Robotu Pozisyona Getir kullanımı
Robotu Pozisyona Getir, programı tamamladıktan sonra robot kolunun ilgili başlangıç konumuna hareket etmesini sağlar. Programı çalıştırabilmeniz için robot kolun başlangıç konumunda olması gerekir.
Daha fazla bilgi için robot Kullanım Kılavuzunda Robotu Pozisyona Getir bölümüne göz atın.
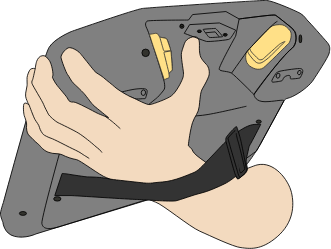
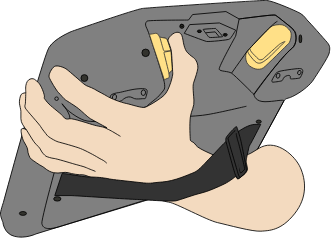
3PE düğmesini kullanıp robot kolunu pozisyona getirmek için:
-
Programınız tamamlandığında Yürüt düğmesine basın
-
Baştan yürüt seçeneğini belirleyin.
PolyScope'ta, Robotu Pozisyona Getir ekranı görünür ve robot kolu hareketini gösterir.
-
Light-press and hold the 3PE button.
-
Now, on PolyScope, press and hold Automove, for the robot arm to move to the start position.
Programı Yürüt ekranı belirir.
-
Programınızı çalıştırmak için 3PE düğmesine hafifçe basın.
-
Programı durdurmak için 3PE düğmesini serbest bırakın.