Handledens klämmomentgräns
| Beskrivning |
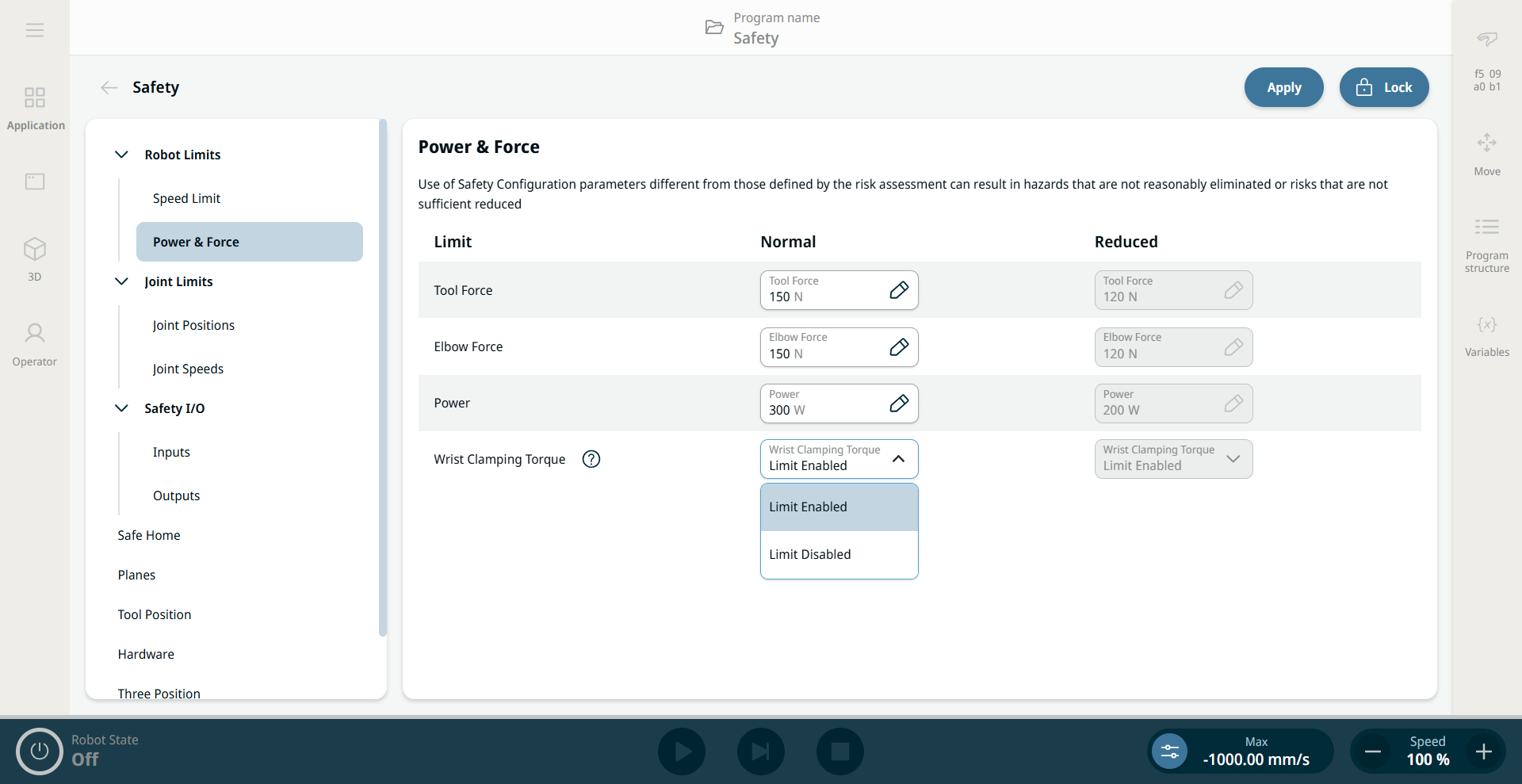
Vridmomentbegränsning för handled är en inställning som aktiverar eller inaktiverar begränsningen av det maximala vridmomentet för robotens handledsleder. Begränsningen är aktiverad som standard. Denna säkerhetsfunktion begränsar hur mycket vridmoment handleden kan utöva vid tryck.
|
|
Handledens klämmomentgränsdetaljer |
När den är aktiverad begränsar roboten vridmomentet i handledsleden för att förhindra fastklämning mellan handleden, nyttolasten och robotens underarm. När inställningen är aktiverad definieras även en övre gräns utan säkerhetsklassificering för de tillämpade vridmomentfönstren för bas-, axel- och armbågslederna. I kraftstyrningsapplikationer kan de uppnåbara kontaktkrafterna vara betydligt lägre än de angivna krafterna i säkerhetsfunktionerna Verktygskraftsgräns och Armbågskraftsgräns.
När den är inaktiverad kan roboten använda högre tryckkraft med handledsleden, till exempel i kraftstyrda tillämpningar. När funktionen är inaktiverad måste riskerna för fastklämning mellan handleden, lasten och robotens underarm minskas på annat sätt. Denna säkerhetsfunktion är aktiverad på alla robotar som standard. I PolyScope X version 10.12 och senare är det möjligt att inaktivera denna säkerhetsfunktion.
|
|
Aktivera och inaktivera vridmomentbegränsning för handleden |
|