Säkerhetsplan med hjälp av en ram
| Beskrivning |
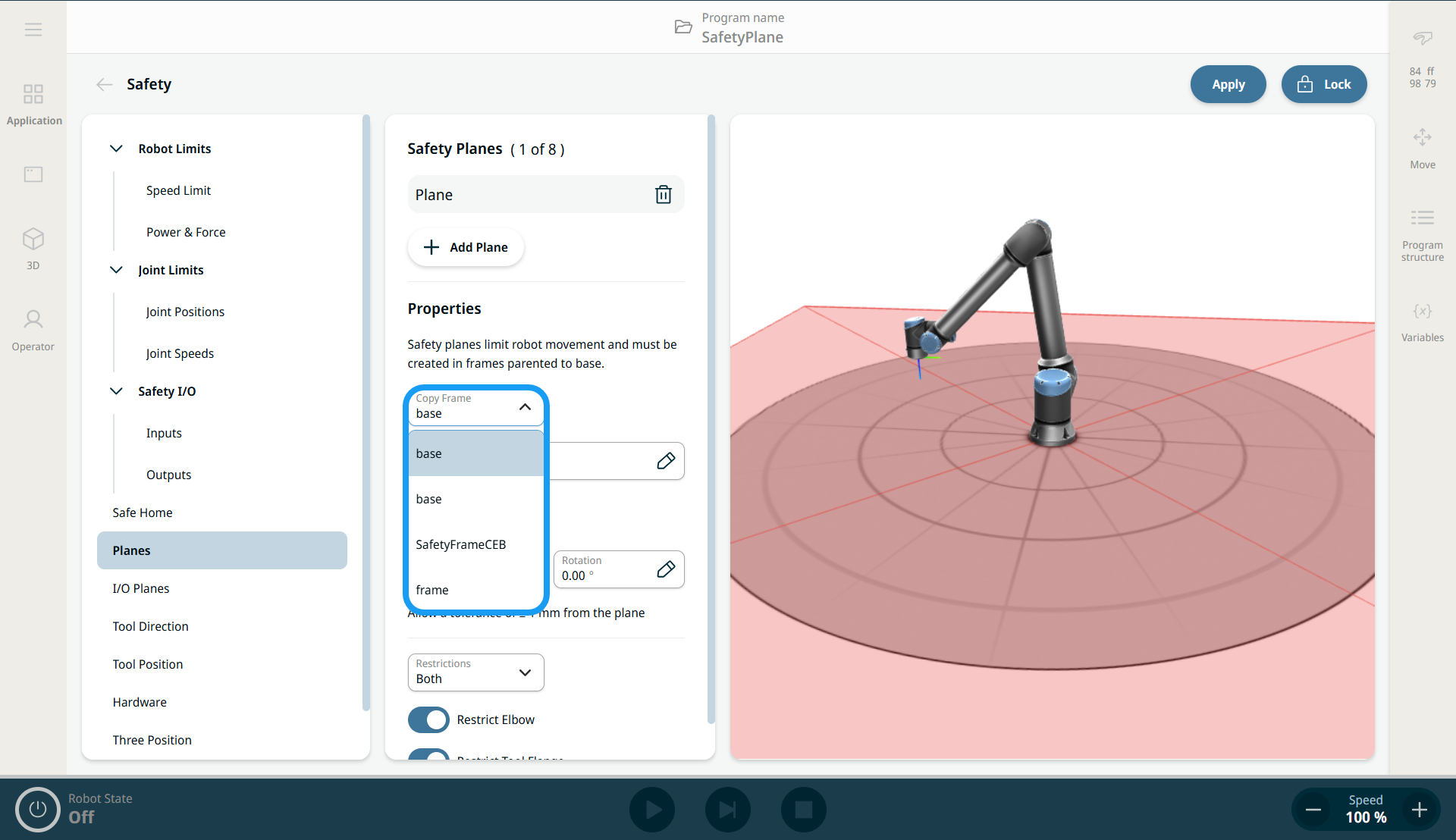
Du kan använda en befintlig ram för att definiera ett säkerhetsplan. Detta ger ett mer intuitivt sätt att ange planparametrar utifrån en fördefinierad position och rotation (X, Y, Z, RX, RY, RZ). Välj ramen i Kopiera ram i rullgardinsmenyn.
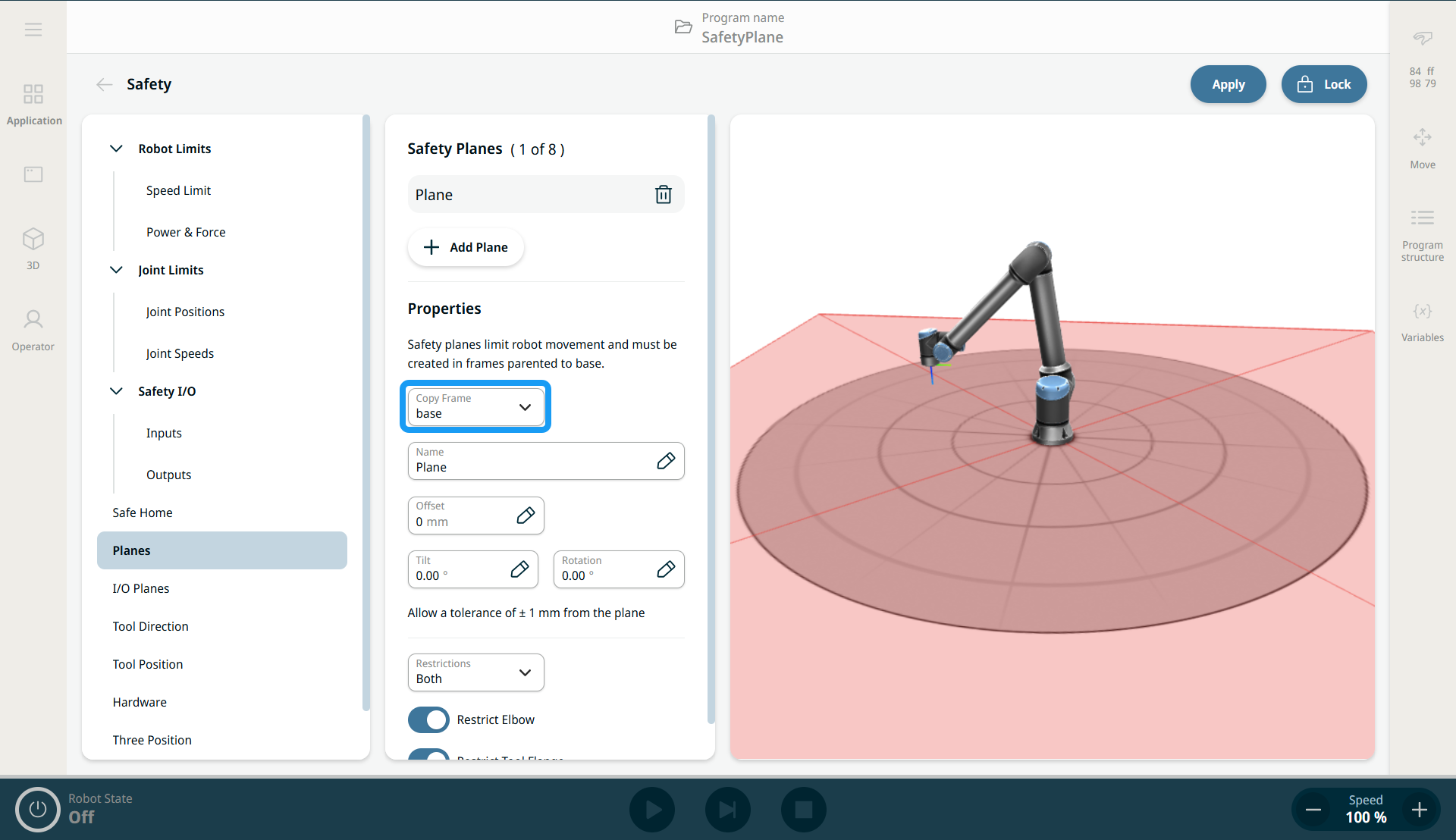
Rullgardinsmenyn Kopiera ram finns i parametrarna för en säkerhetsplan-definition på skärmen Plan. Den här listan innehåller ramar som definierats på skärmen Frames. När du väljer en ram används den som definition för säkerhetsplanet. Om du anger parametrar för förskjutning, lutning och rotation tillämpas de på den valda ramen (se "Konfigurera ett säkerhetsplan"). Det resulterande säkerhetsplanet kombinerar alla parametrar.
|
|
|
Se avsnittet ”Rams” i programvaruhandboken. |
|
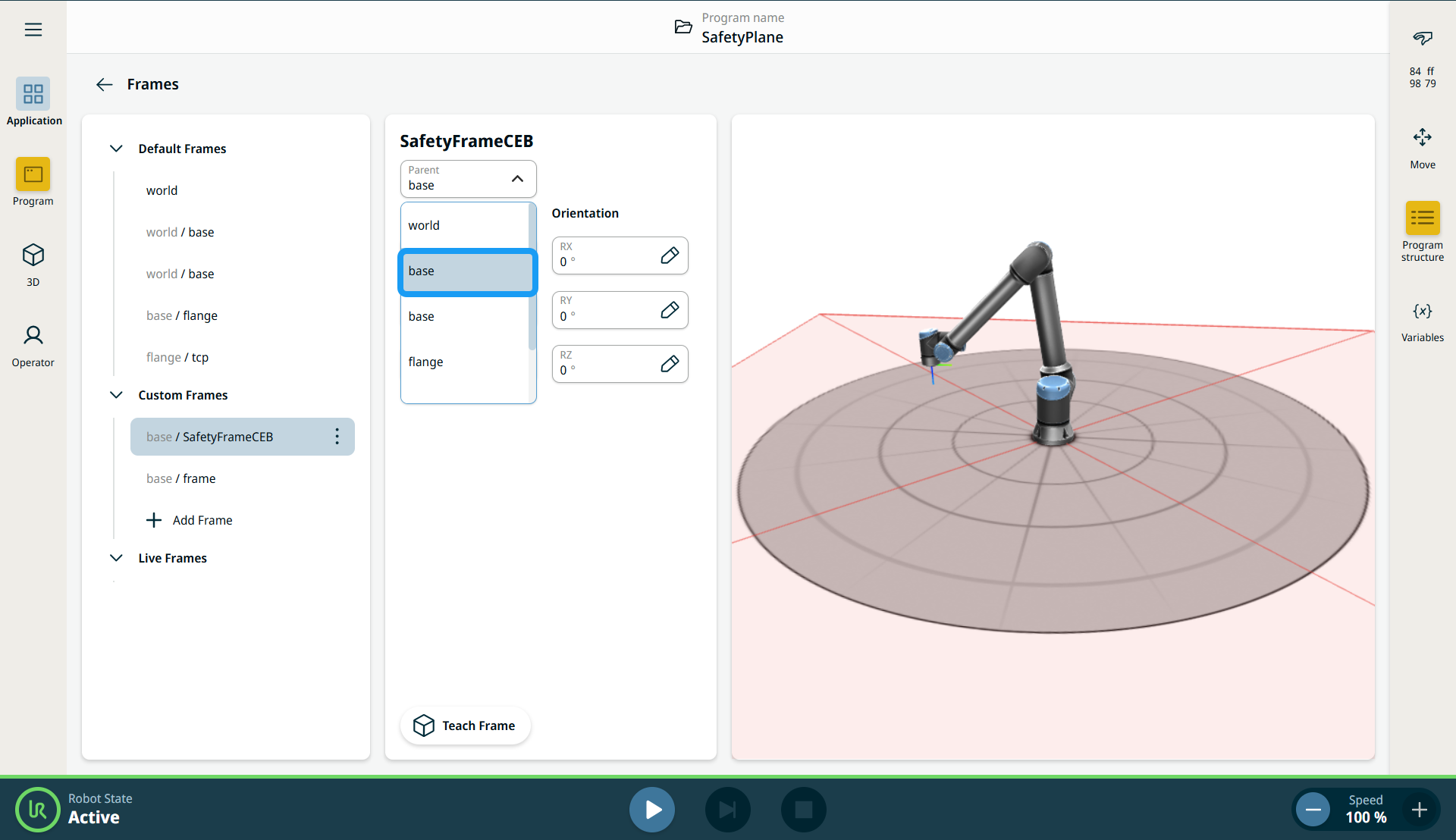
Skapa en ram |
|
|
|
Välj referensram i säkerhetsplanet |
|
|
|
|
|
|
En ram som används för ett säkerhetsplan kan vara vänd på tvärt mot vad du förväntar dig. Om roboten är placerad på den sida av planet som bryter mot reglerna, lägg till en lutning på 180 grader. För begränsningar avseende plankonfigurationer, armbågebegränsningar och verktygsflänsbegränsningar, se ”Säkerhetsplan”.
|