Použitie funkcie Pohyb robota do polohy
Pohyb robota do polohy umožňuje pohyb ramena robota do počiatočnej polohy po dokončení programu. Pred spustením programu musí byť rameno robota v počiatočnej polohe.
Ďalšie informácie nájdete v sekcii Pohyb robota do polohy v používateľskej príručke robota.
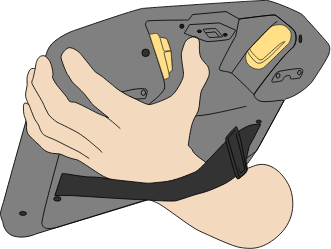
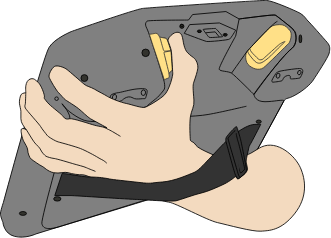
Pohyb ramena robota do polohy pomocou tlačidla 3PE:
-
Po dokončení programu stlačte Spustiť
-
Vyberte Prehrať od začiatku.
Na PolyScope sa zobrazí obrazovka Pohyb robota do polohy, ktorá zobrazí pohyb ramena robota.
-
Light-press and hold the 3PE button.
-
Now, on PolyScope, press and hold Automove, for the robot arm to move to the start position.
Zobrazí sa obrazovka Play Program.
-
Ľahkým stlačením tlačidla 3PE spustite svoj program.
-
Pre zastavenie programu uvoľnite tlačidlo 3PE.