Bruke Flytt robot til posisjon
Flytt robot til posisjon lar robotarmen flytte seg til den startposisjonen etter at du fullfører et program. Robotarmen må være i startposisjon før du kan kjøre programmet.
For mer informasjon, vennligst se Flytt robot til posisjon-avsnittet i robotens brukermanual.
Slik bruker du 3PE-knappen for å flytte robotarmen til posisjon:
-
Når programmet ditt er ferdigstilt, trykk på Spill av
-
Velg Spill fra begynnelsen.
På PolyScope vises Flytt robot til posisjon-skjermen med robotarmbevegelser.
-
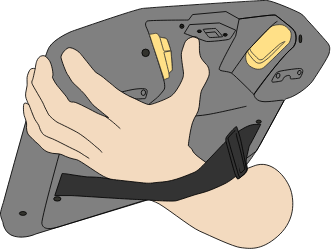
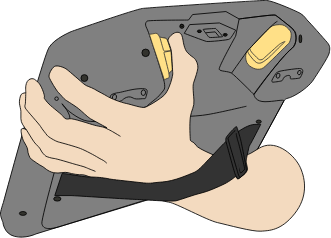
Light-press and hold the 3PE button.
-
Now, on PolyScope, press and hold Automove, for the robot arm to move to the start position.
Spill av program-skjermen vises.
-
Oppretthold et lett trykk på 3PE-knappen for å kjøre programmet.
-
Frigjør 3PE-knappen for å stanse programmet.