Gebruik van Breng robot in positie
Met Breng robot in positie kan de robotarm naar de startpositie worden verplaatst nadat u een programma heeft voltooid. De robotarm moet in de startpositie staan voordat u het programma kunt uitvoeren.
Zie voor meer informatie het hoofdstuk Breng robot in positie in de gebruikershandleiding van de robot.
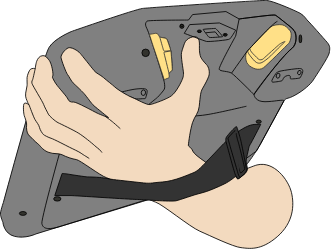
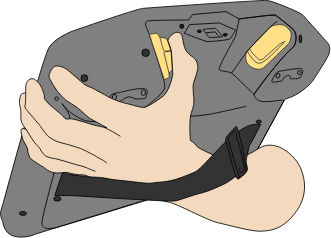
Gebruik van de 3PE-knop om de robotarm in positie te brengen:
-
Druk wanneer uw programma compleet is op Afspelen
-
Selecteer Afspelen vanaf begin.
In PolyScope wordt het scherm Breng robot in positie weergegeven dat de beweging van de robotarm weergeeft.
-
Light-press and hold the 3PE button.
-
Now, on PolyScope, press and hold Automove, for the robot arm to move to the start position.
Het scherm Programma afspelen wordt weergegeven.
-
Houd lichte druk op de 3PE-knop om uw programma uit te voeren.
-
Laat de 3PE-knop los om je programma te stoppen.