I/O-vlakken
| Beschrijving |
De functie I/O-vlakken biedt een flexibeler gebruik van veiligheidsvlakken in vergelijking met de standaard Veiligheidsvlakken functionaliteit. Hiermee kun je veiligheidsvlakken activeren en deactiveren met behulp van eindingangen en/of een uitgangssignaal genereren wanneer de veiligheidsbollen een veiligheidsvlak passeren.
|
|
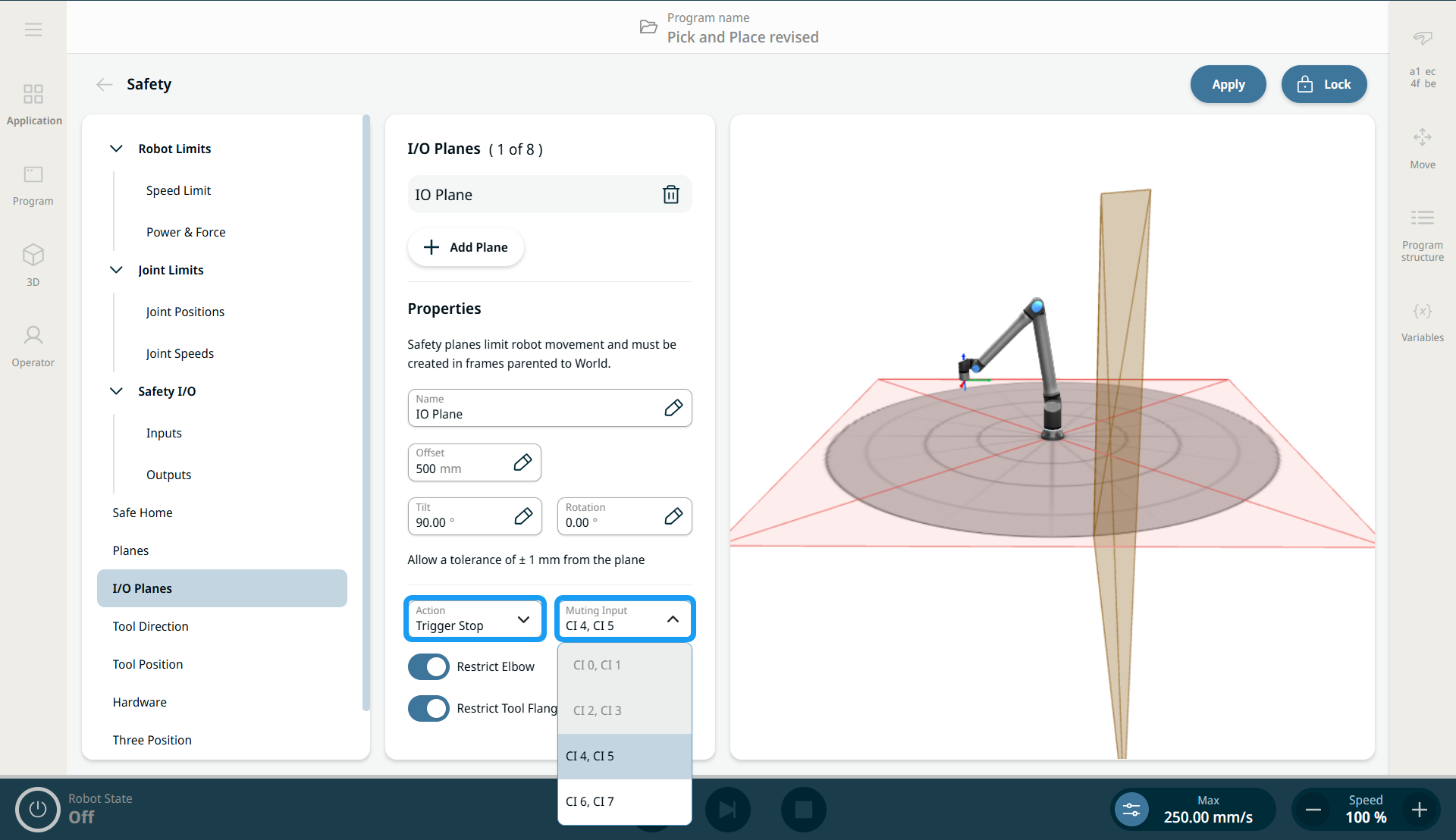
Ingang/Stopvlak |
Trigger Stop activeert een I/O-vlakstop. Het kan worden gedempt met een veiligheidsingang. Als de robot naar het vliegtuig toe beweegt, stopt hij en wacht hij tot de veiligheidsingang het vliegtuig uitschakelt. Wanneer het vlak inactief is, kan de robot vrij bewegen. Wanneer het vlak actief is en de robot het vlak niet heeft overgestoken, stopt de robot voordat hij het vlak oversteekt. Als het vlak wordt geactiveerd terwijl de robot zich op de rand van het vlak beweegt, kan de robot het vlak oversteken en in het ergste geval stoppen volgens de geconfigureerde afstands- en stoptijdlimieten. Wanneer het vlak geactiveerd is en de robot het vlak heeft overgestoken, stopt de robot volgens de geconfigureerde stopafstand en stoptijdlimieten.
|
|
|
|
|
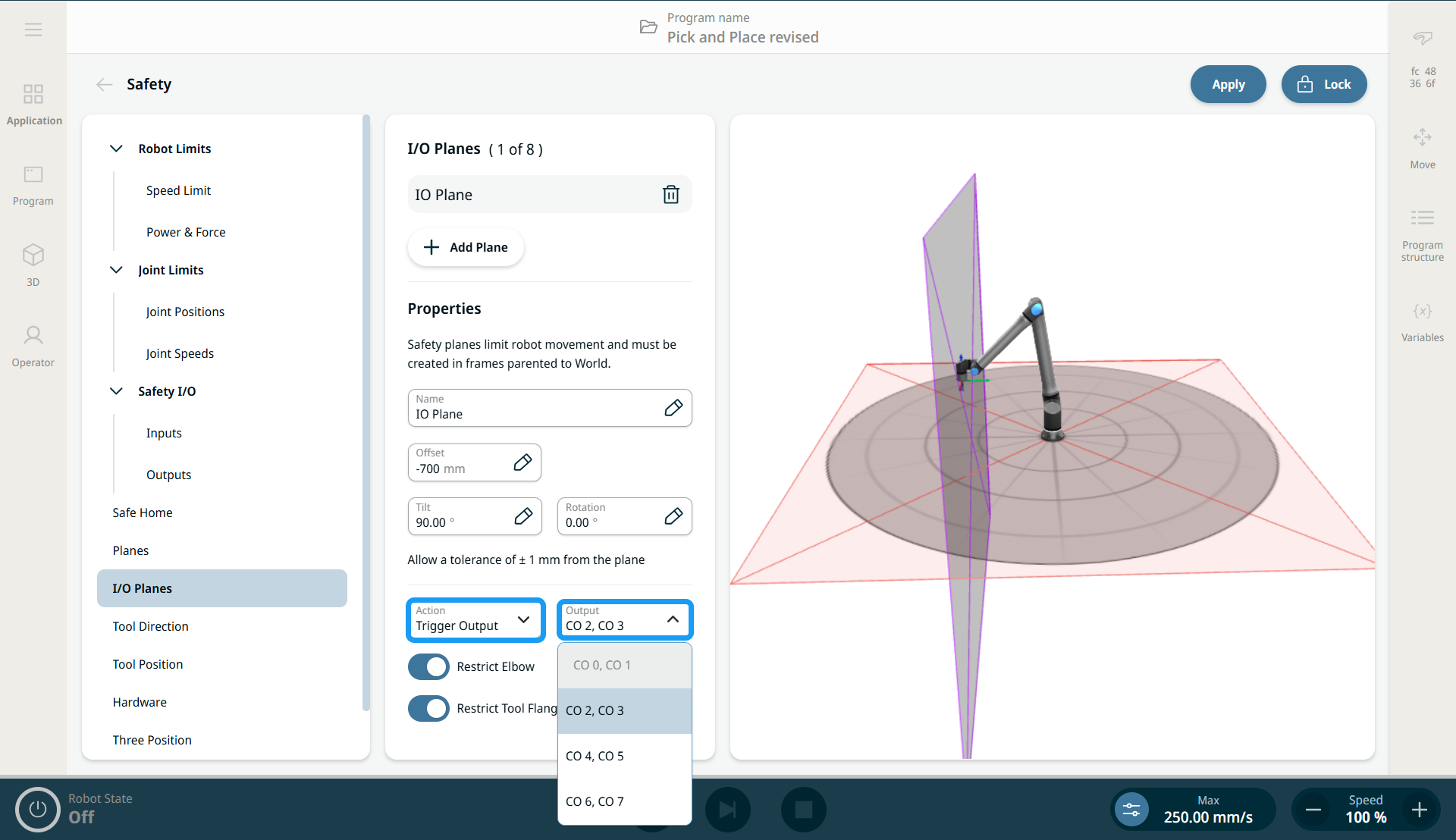
Uitgangsvlak |
Triggeruitgang genereert een veiligheidsuitgang gebaseerd op de vraag of een of meer van de veiligheidsbollen het vlak hebben overschreden. Wanneer een of meer van de veiligheidsbollen een vlak hebben overschreden dat is gedefinieerd als triggeruitgang, wordt de veiligheidsuitgang die overeenkomt met dat vlak geactiveerd. "Geactiveerd" betekent dat de veiligheidsuitgangen elektrisch "Laag" zijn ingesteld. Wanneer een van de veiligheidsbollen een vlak heeft overschreden dat is gedefinieerd als triggeruitgang, wordt de veiligheidsuitgang die overeenkomt met dat vlak geactiveerd.
|