Veilig thuis
| Beschrijving |
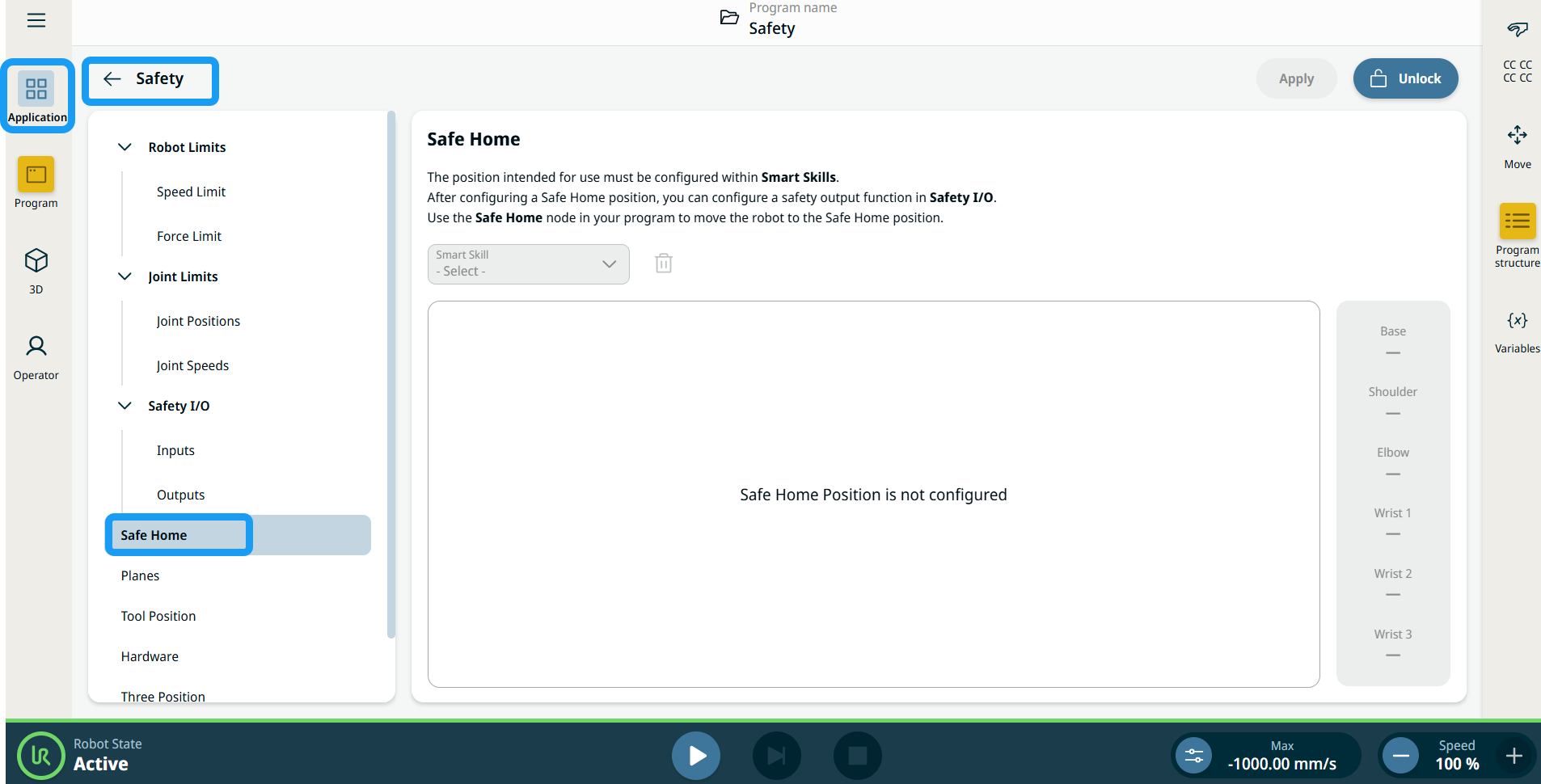
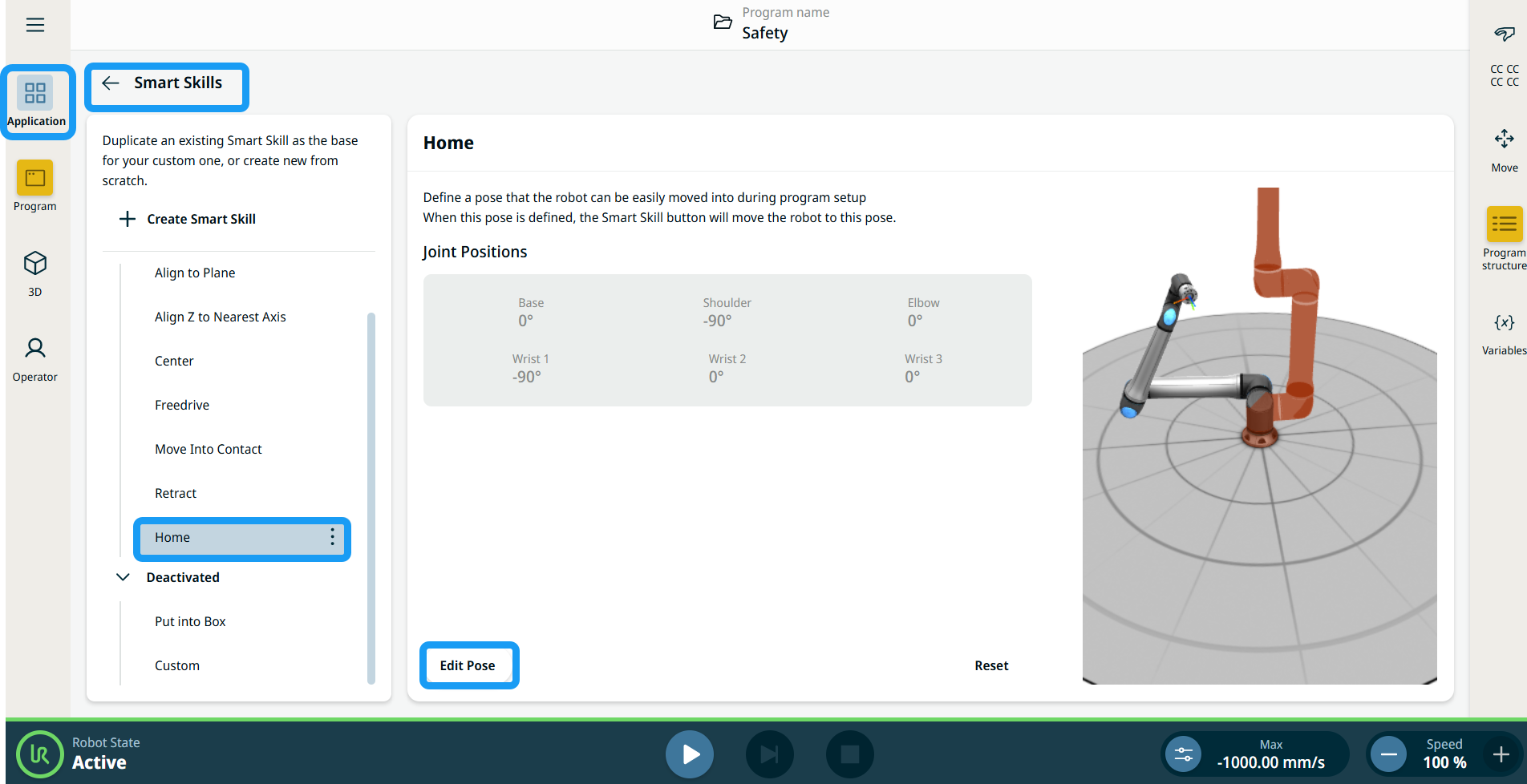
Veilige uitgangspositie is een PolyScope X-functie waarmee gebruikers een veiligheidsgerelateerde uitgang kunnen definiëren die wordt geactiveerd wanneer de robot de geconfigureerde veilige uitgangspositie bereikt. De gebruiker kiest Uitgangspositie in de vervolgkeuzelijst met beschikbare Smart Skill-posities, die kunnen worden toegewezen als referentie voor de veilige uitgangspositie.
|
|
Toegang tot Veilige uitgangspositie |
|
|
|
|
|
|
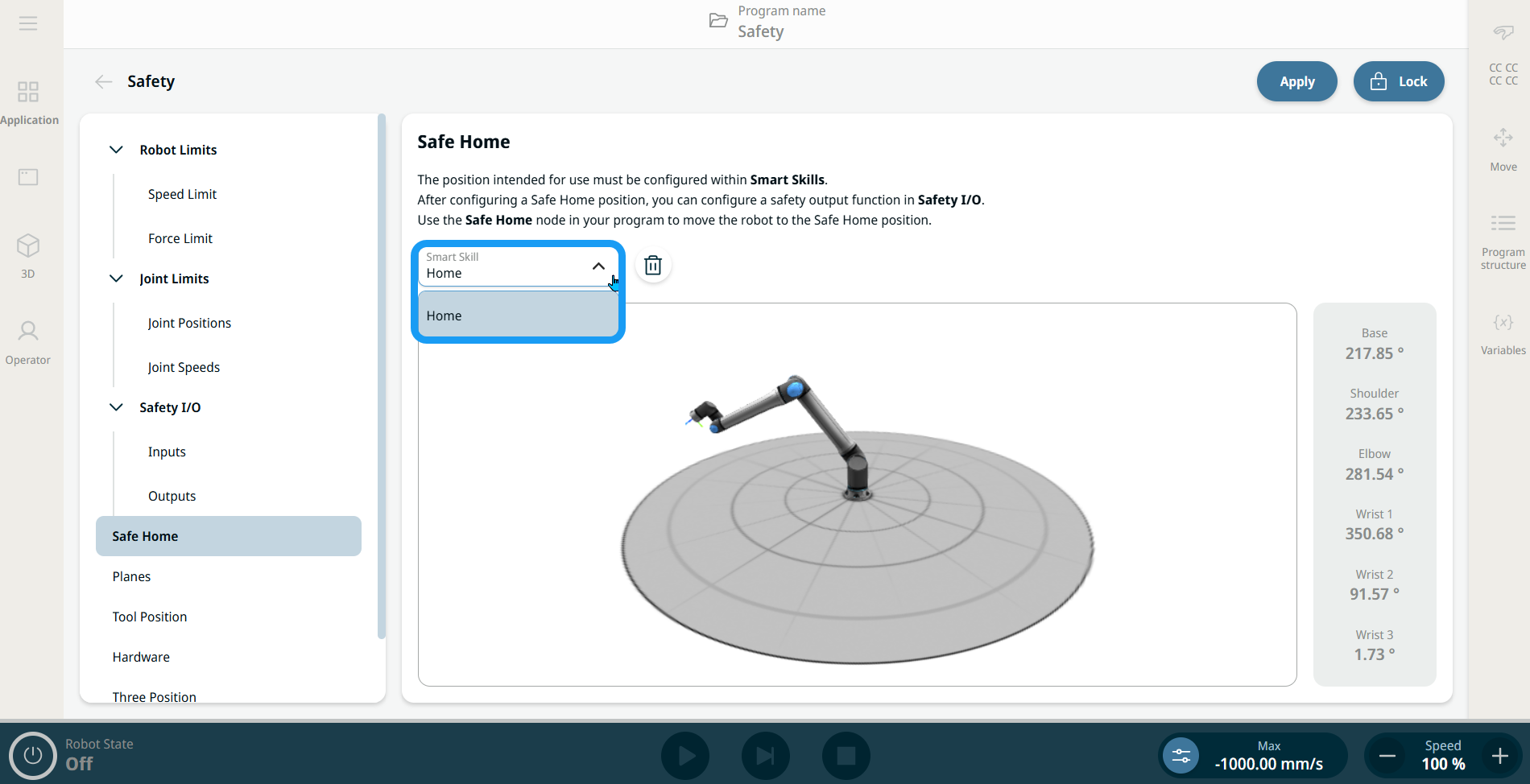
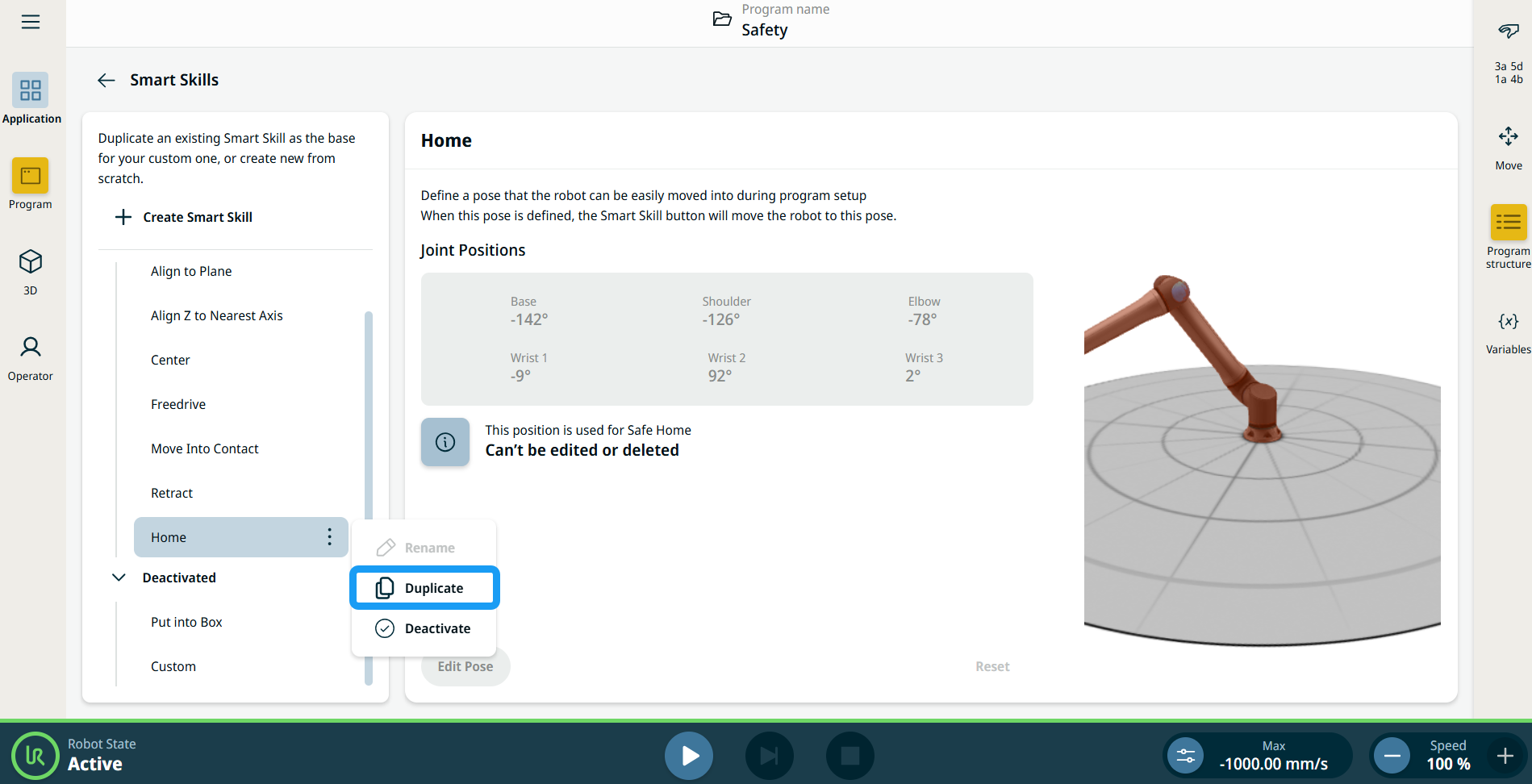
Als de Position Smart Skill is geselecteerd als positie-referentie voor Safe Home:
|
|
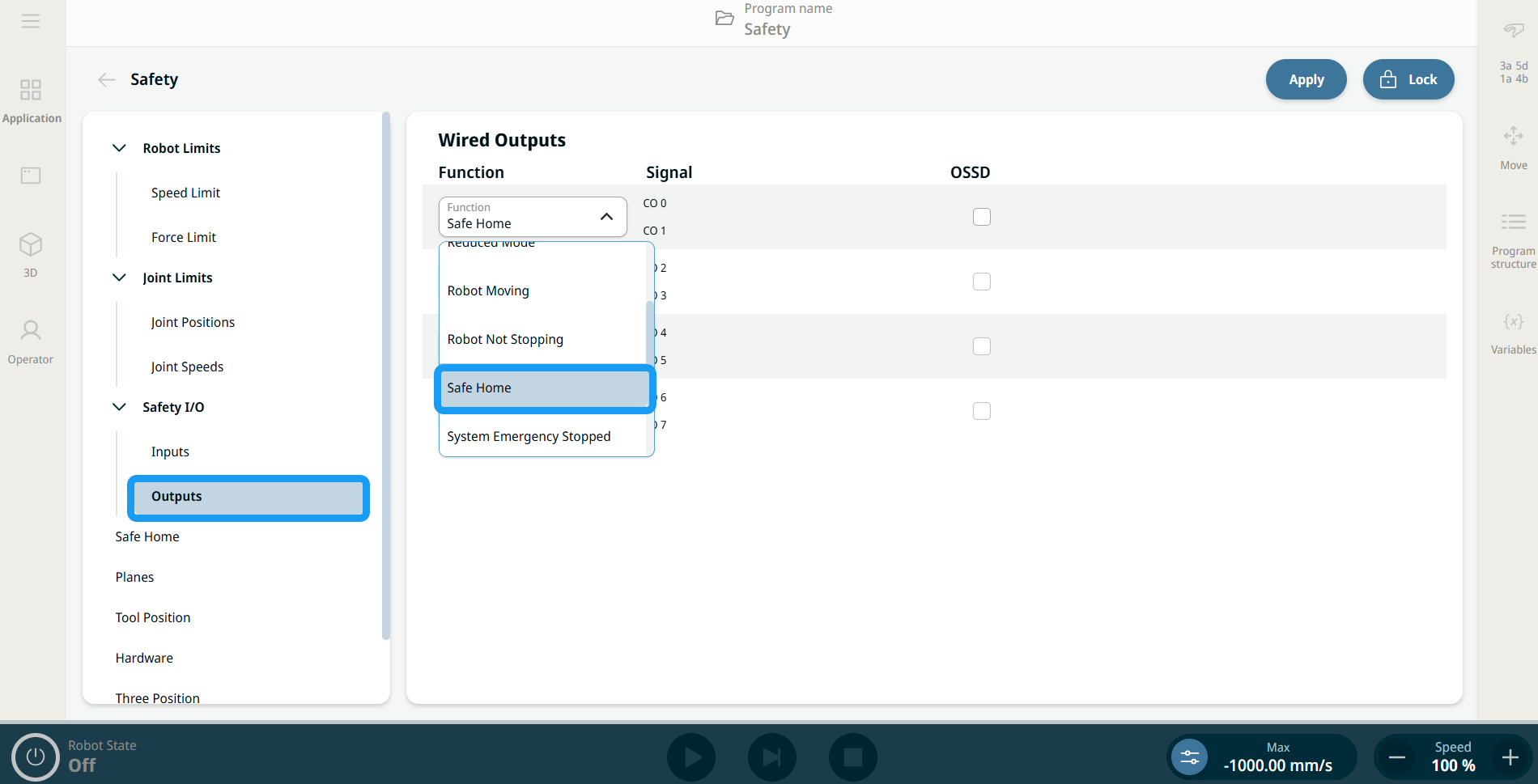
Functie Veilige uitgangspositie in uitgangen |
Als de uitgangspositie is toegewezen aan een Smart Skill-positie in Veiligheid, bevat de vervolgkeuzelijst voor Veiligheidsuitgangsfunctie Veilige uitgangspositie als nieuwe functietoewijzing. Kies Veilige uitgangspositie in de Functie-velden in Uitgangen van Veiligheids-I/O.
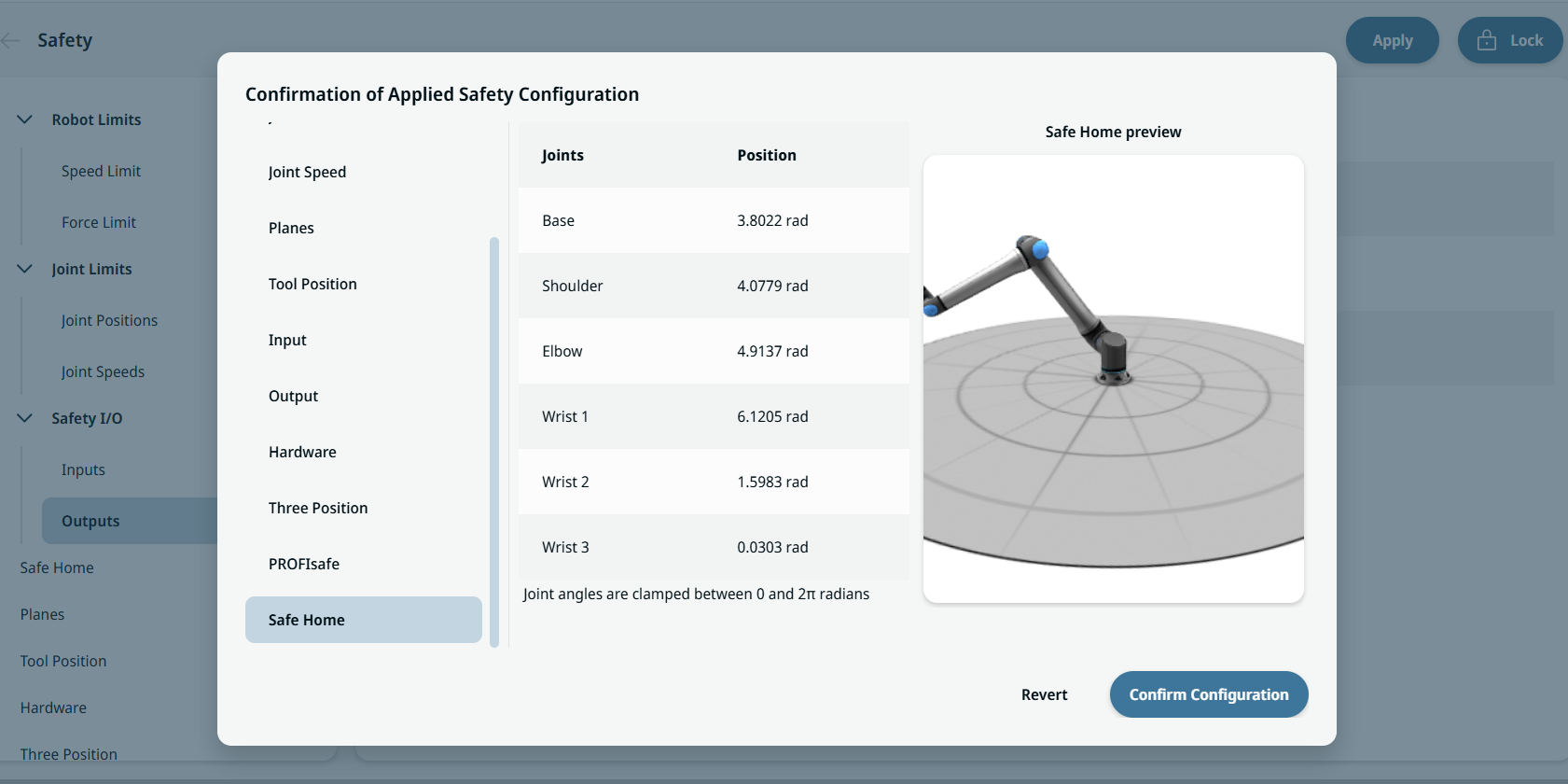
Veilige uitgangspositie is te vinden in de functietoewijzingstabel in de overzichtsdialoog Bevestiging van toegepaste veiligheidsinstellingen.
|
|
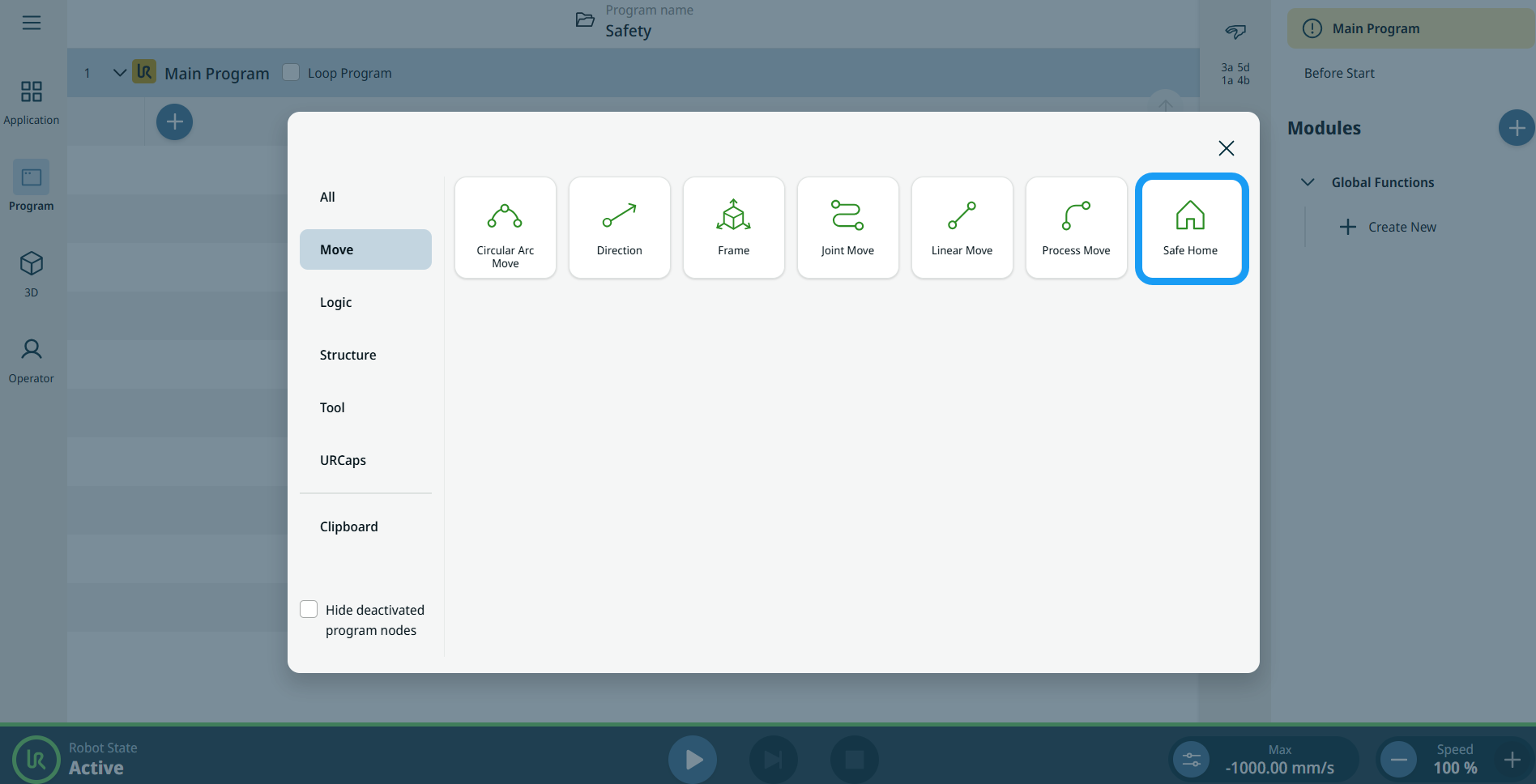
Veilige uitgangspositie als programmanode |
De programmanode Veilige uitgangspositie is te vinden onder de categorie Bewegen-nodes binnen de Commandonodes. Deze node wordt gebruikt om de robot opdracht te geven naar zijn vooraf gedefinieerde veilige uitgangspositie te bewegen, zoals geconfigureerd in de instellingen van de veiligheidstoepassing voor veilige uitgangspositie.
Als de node wordt toegevoegd zonder een veilige uitgangspositie geconfigureerd in Veiligheid, wordt de node geel gemarkeerd.

De commandonode Veilige uitgangspositie heeft opties voor bewegingsprofielen en andere geavanceerde instellingen wanneer op het ellipspictogram
|
 wordt getikt.
wordt getikt.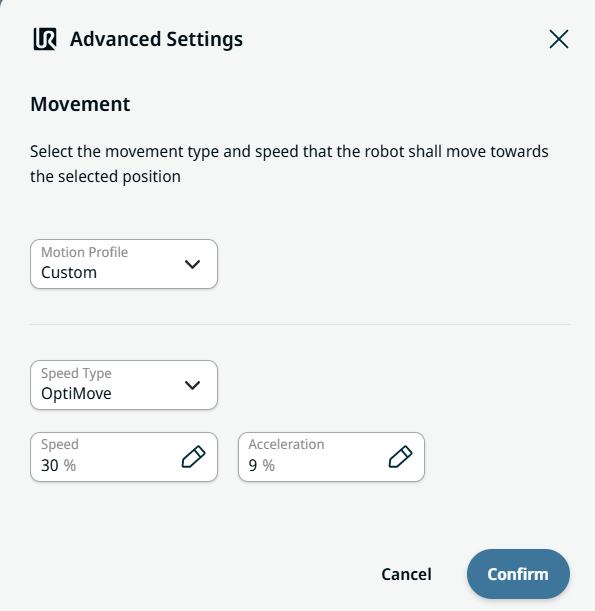
| Geavanceerde instellingen |
Gebruikers kunnen bewegingsprofielen maken in de Geavanceerde instellingen met behulp van de twee tabbladen en twee velden:
Bewegingsprofiel is een functie waarmee gebruikers voorgedefinieerde bewegingsprofielen kunnen instellen in bewegingsnodes: Gewrichtsbeweging, Lineaire beweging, Cirkelboogbeweging, Procesbeweging en Richting. Met een aangepast bewegingsprofiel kunnen gebruikers bewegingsgegevens definiëren in de bewegingsnode. In het veld Snelheidstype is OptiMove de standaardoptie. Kies de Classic beweging als u snelheid en versnelling in graden per seconde of mm per seconde wilt invoeren. OptiMove-instellingen worden in procenten opgegeven om het gebruik en de instelling te vereenvoudigen. Gebruikers kunnen het percentage van de gewenste snelheid configureren op het tabblad Snelheid, waarmee de gewenste bewegingssnelheid wordt ingesteld als een percentage van de maximale snelheid van de robot. Gebruikers kunnen het percentage van de gewenste acceleratie configureren op het tabblad Acceleratie, dat limieten instelt voor het doelkoppel tijdens acceleratie en deceleratie als een percentage van het maximale vermogen van de robot.
|