Veiligheids-I/O
| Beschrijving |
De I/O’s zijn verdeeld tussen ingangen en uitgangen en zijn gekoppeld zodat elke functie een categorie 3 PLd-mogelijkheid vormt.
Bij het starten van programma's via een I/O- of veldbusingang, kan de robot beginnen te bewegen vanuit de positie die hij heeft. Handmatige beweging naar het eerste waypoint via PolyScope is niet vereist.
|
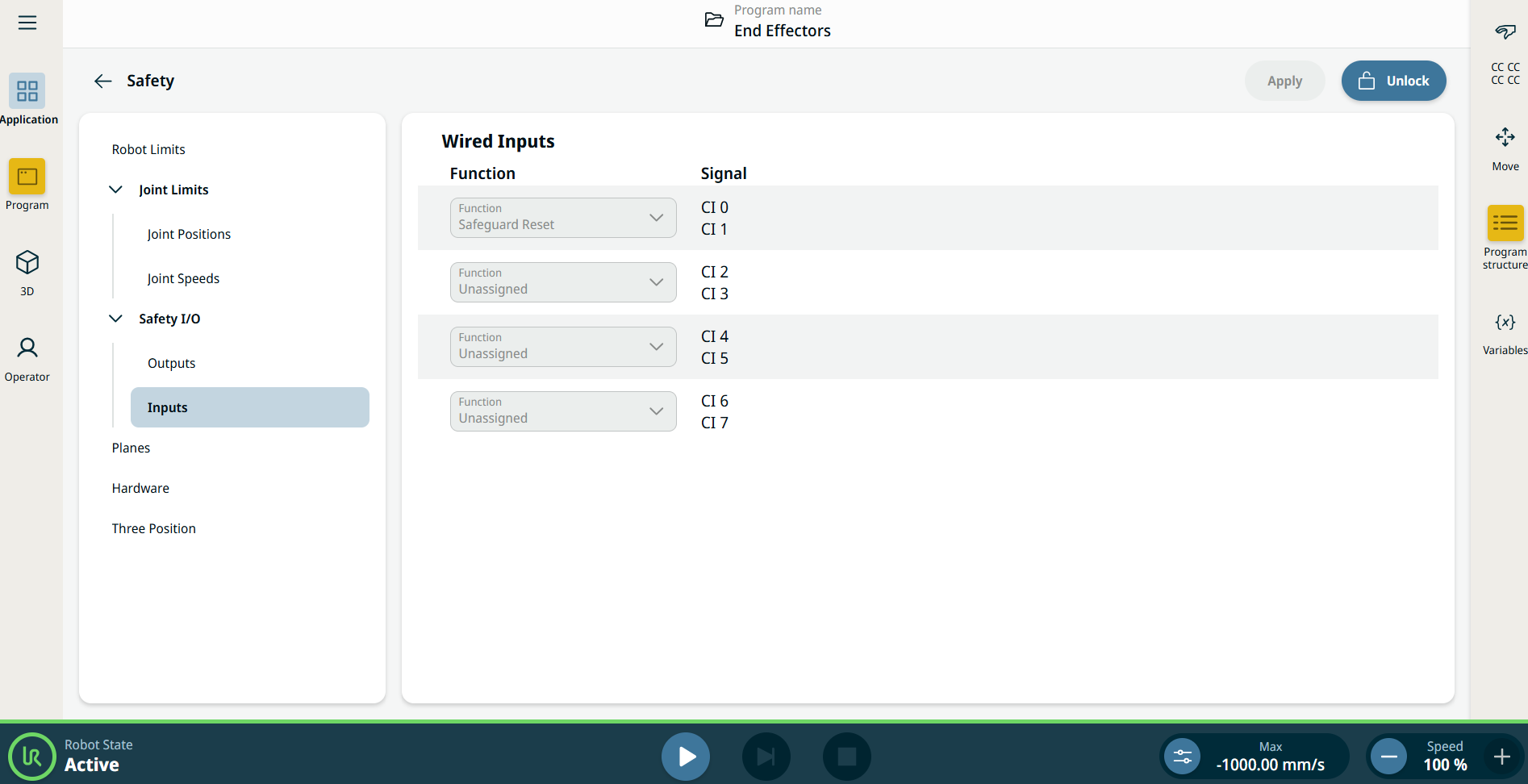
| Regelkast- ingangen |
De ingangen worden beschreven in de onderstaande tabellen:
Wanneer de standaard Beveiliging resetten is uitgeschakeld, vindt er een automatische reset plaats wanneer de beveiliging niet langer een stop triggert. Dit kan gebeuren als een persoon door het veld van de beveiliging gaat. Als de beveiliging geen persoon detecteert en de persoon wordt blootgesteld aan gevaren, is een automatische reset verboden volgens de normen.
Wanneer Beveiligde stop automatische modus is ingeschakeld, wordt er geen beveiligde stop getriggerd in de handmatige modus.
|
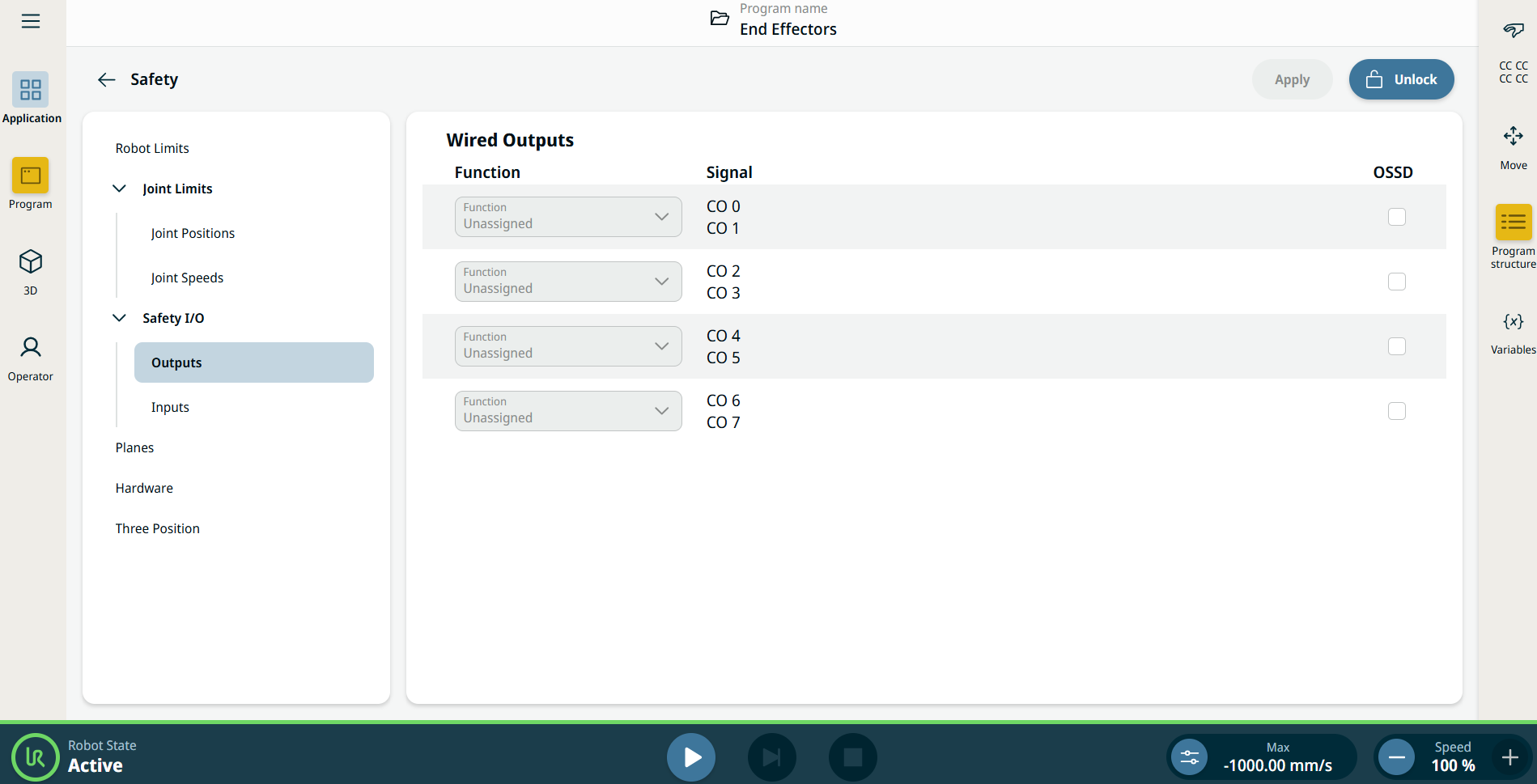
| Regelkastuitgangen |
Alle veiligheidsuitgangen worden laag in het geval van een overtreding of storing van het veiligheidssysteem. Dit betekent dat de uitgang Systeemstop een stop initieert, ook wanneer geen noodstop wordt getriggerd. U kunt de volgende uitgangssignalen voor veiligheidsfuncties gebruiken. Alle signalen gaan terug naar laag als de status waardoor het hoge signaal geactiveerd is, beëindigd is:
Externe machines die de noodstopstatus via de uitgang Systeemstop van de robot ontvangen, moeten aan ISO 13850 voldoen. Dit is met name noodzakelijk in installaties waarbij de ingang Noodstop robot met een extern Noodstopapparaat is verbonden. In zulke gevallen wordt de uitgang Systeemstop hoog wanneer het externe noodstopapparaat wordt vrijgegeven. Daarvoor is geen ingrijpen van de operator van de robot nodig. Om aan de veiligheidsnormen te voldoen, moet de externe machine handmatig ingrijpen verzoeken om verder te kunnen.
|