I/O 플레인
| 설명 |
I/O 평면 기능은 표준에 비해 안전 평면을 더 유연하게 사용할 수 있습니다. 안전 평면 기능보다 유연하게 사용할 수 있습니다. 터미널 입력을 사용하여 안전 평면을 활성화 및 비활성화하거나 안전 구가 안전 평면을 통과할 때 출력 신호를 생성할 수 있습니다.
|
|
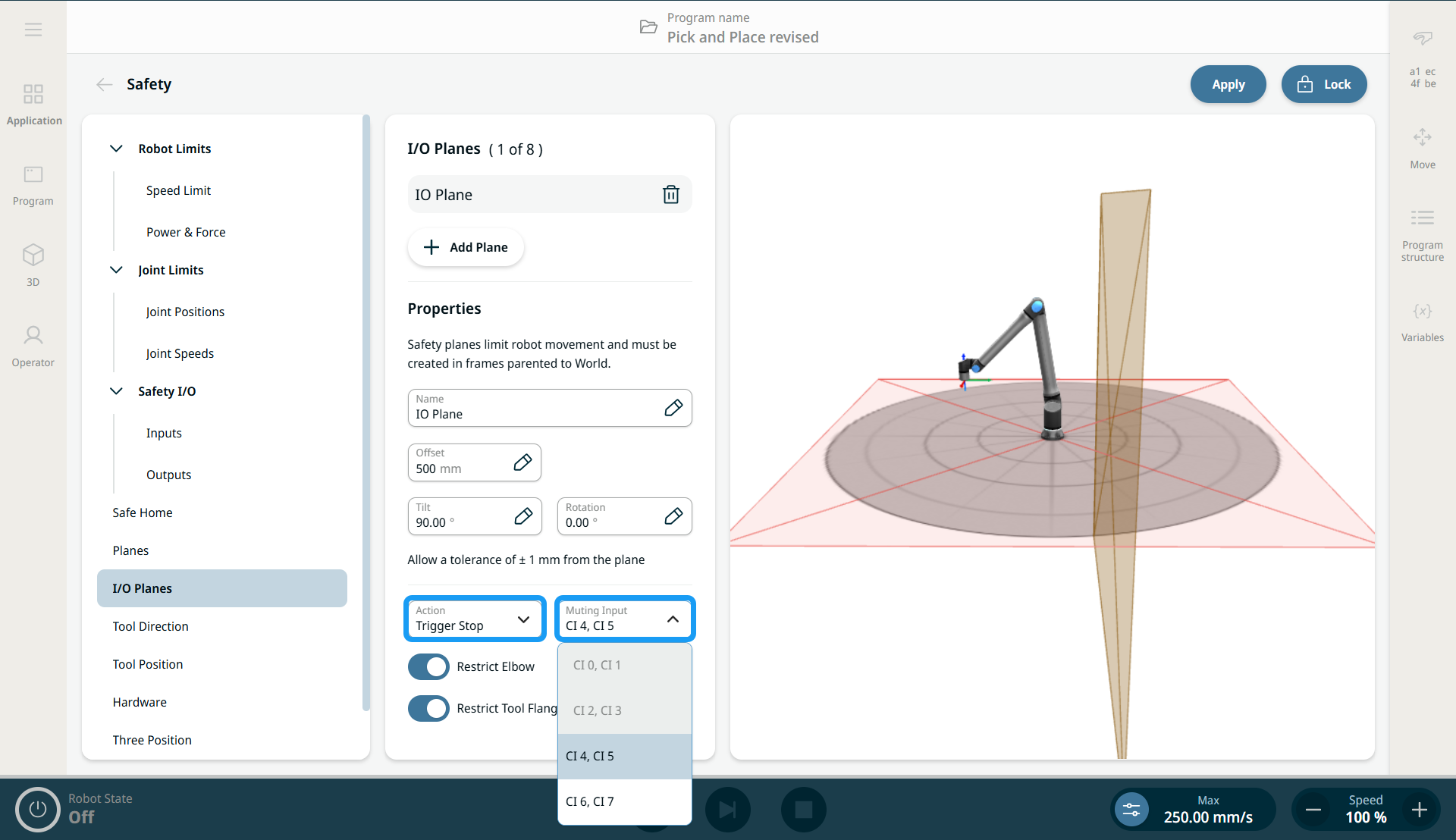
입력/정지 평면 |
트리거 정 지는 I/O 플레인 정지를 트리거합니다. 안전 입력을 사용하여 음소거할 수 있습니다. 음소거하지 않으면 비행기를 향해 움직이면 로봇이 멈추고 안전 입력으로 비행기가 음소거될 때까지 기다립니다. 비행기가 비활성 상태일 때는 로봇이 자유롭게 움직일 수 있습니다. 평면이 활성화되어 있고 로봇이 평면을 횡단하지 않은 경우 로봇은 평면을 횡단하기 전에 멈춥니다. 평면이 활성화되면 로봇이 평면의 가장자리에서 이동하는 동안 로봇이 평면을 가로질러 최악의 경우 구성된 거리 및 정지 시간 제한에 따라 정지할 수 있습니다. 평면이 활성화되고 로봇이 평면을 통과하면 로봇은 설정된 정지 거리 및 정지 시간 제한에 따라 정지합니다. |
|
|
|
|
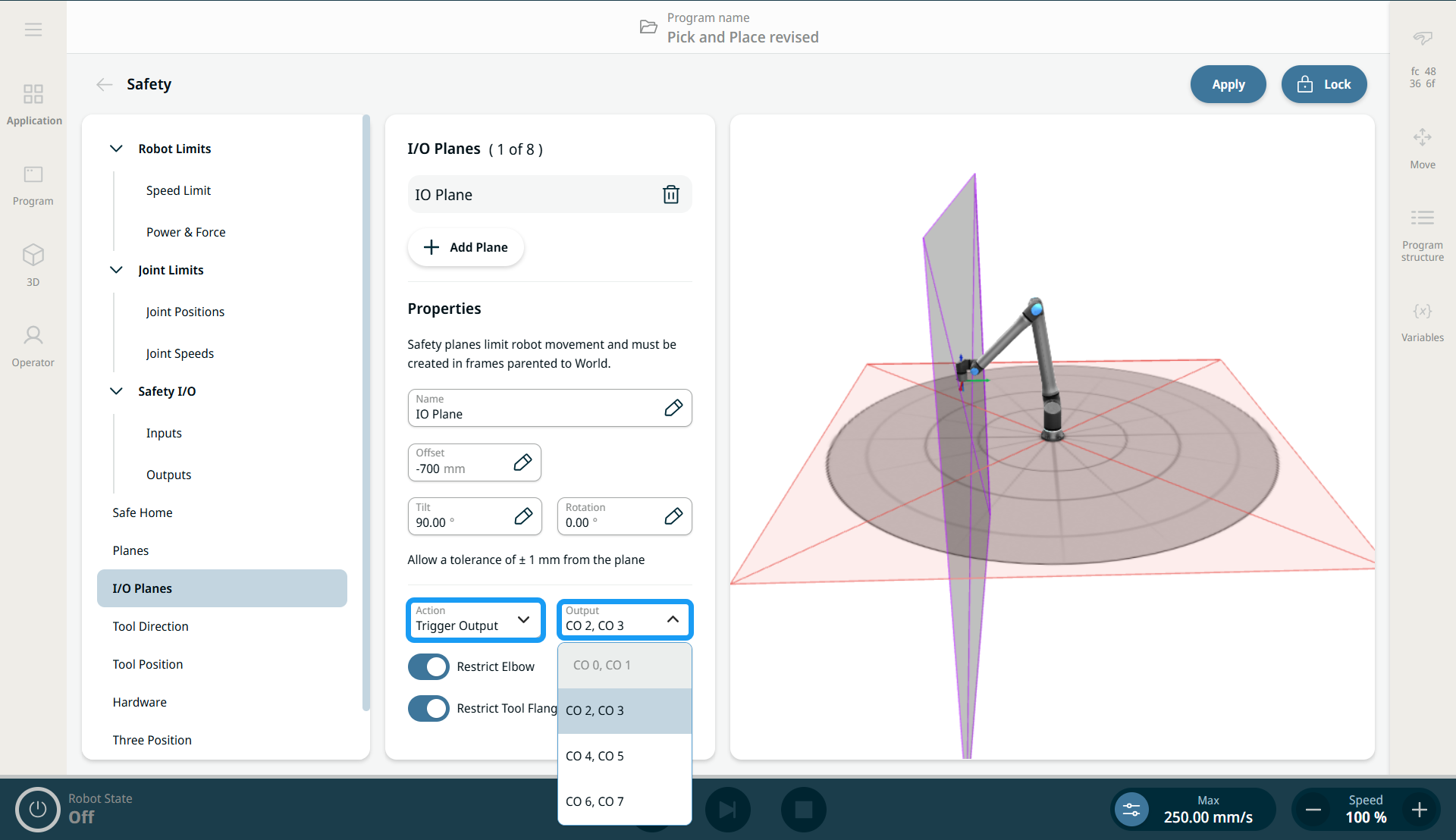
출력 평면 |
트리거 출력은 하나 이상의 안전 구가 평면을 통과했는지 여부에 따라 안전 출력을 베이스로 생성합니다. 하나 이상의 안전 구가 트리거 출력으로 정의된 평면을 통과하면 해당 평면에 해당하는 안전 출력이 활성화됩니다. "활성화됨"은 안전 출력이 전기적으로 "낮음"으로 설정되어 있음을 의미합니다. 안전 구 중 하나라도 트리거 출력으로 정의된 평면을 넘으면 해당 평면에 해당하는 안전 출력이 활성화됩니다.
|