안전 I/O
| 설명 |
I/O는 입력과 출력으로 나뉘어져 있고, 짝지어져 있어서 각 기능이 카테고리 3 PLd 기능을 제공합니다.
I/O 또는 필드버스 입력에서 프로그램을 시작할 때 로봇은 자신이 있는 위치에서 움직이기 시작할 수 있으며 PolyScope를 통해 첫 번째 웨이포인트로 수동 이동이 필요하지 않습니다.
|
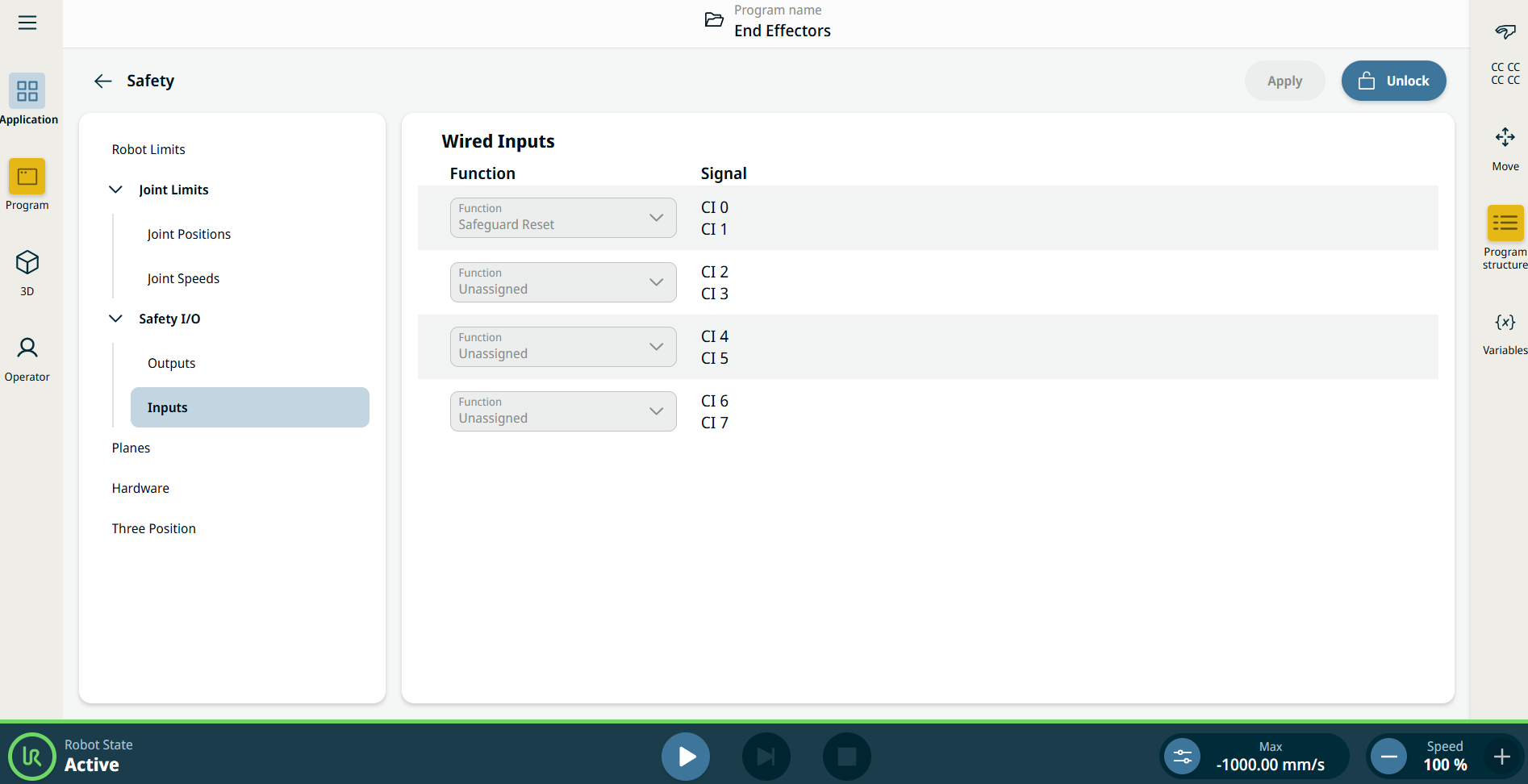
| 컨트롤 박스 입력 |
입력은 아래 표에 설명되어 있습니다.
기본 세이프가드 초기화가 비활성화되면, 세이프가드가 더 이상 정지를 트리거하지 않을 때 자동 초기화가 수행됩니다. 사람이 세이프가드 필드를 통과하면 이렇게 될 수 있습니다. 사람이 세이프가드에 의해 감지되지 않고 위험에 노출된 경우, 표준에 의해 자동 초기화가 금지됩니다.
자동 모드 세이프가드 정지가 활성화된 경우, 수동 모드에서 세이프가드 정지가 트리거되지 않습니다.
|
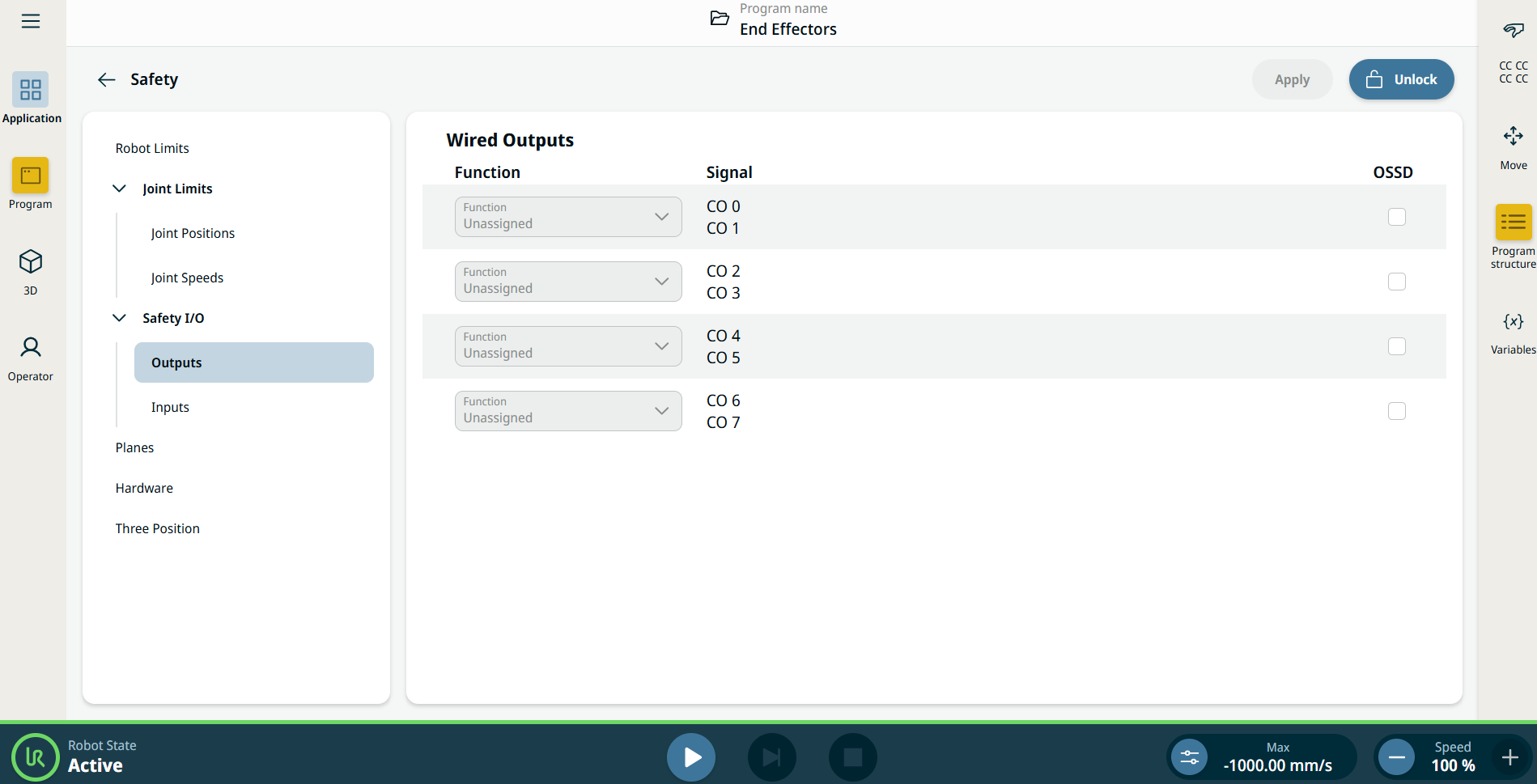
| 컨트롤 박스 출력 |
안전 시스템 위반 또는 오류 발생 시 모든 안전 출력이 낮아집니다. 즉, 비상 정지가 트리거되지 않은 경우에도 시스템 정지 출력이 정지를 시작합니다. 다음과 같은 안전 기능 출력 신호를 사용할 수 있습니다. 모든 신호는 높음 신호를 트리거한 상태가 끝나면 낮음으로 돌아갑니다:
로봇으로부터 시스템 정지 출력을 통해 비상 정지 상태를 받는 외부 기계는 ISO 13850을 준수해야 합니다. 이는 로봇 비상 정지 입력이 외부 비상 정지 장치에 연결된 설치에서 특히 필요하다. 이러한 경우, 시스템 정지 출력은 외부 비상 정지 장치가 해제되었을 때 높음이 됩니다. 이는 로봇 작업자의 수동 작업을 요구하지 않으면서 외부 기계의 비상 정지 상태가 초기화됨을 의미합니다. 그러므로 안전 표준을 준수하기 위해, 외부 기계를 재개할 때 수동 작업을 수행해야 합니다.
|