리스트 클램핑 토크 제한
| 설명 |
리스트 클램핑 토크 제한은 로봇의 리스트 조인트에 대한 최대 클램핑 토크 제한을 활성화 또는 비활성화하는 설정입니다. 이 제한은 기본적으로 활성화되어 있습니다. 이 안전 기능은 리스트가 푸시할 때 적용할 수 있는 토크 양을 제한합니다.
|
|
리스트 클램핑 토크 제한 세부 정보 |
활성화된 경우 로봇이 리스트 조인트의 토크를 제한하여 로봇의 리스트, 페이로드 및 하단 암 사이에 끼이지 않도록 방지합니다. 이 설정이 활성화된 경우, 베이스, 숄더 및 엘보우 조인트의 적용 토크 창에 대한 안전 등급이 없는 상한도 정의합니다. 포스 제어 애플리케이션에서, 달성 가능한 접촉력은 툴 포스 제한 및 엘보우 포스 제한 안전 기능에서 지정된 포스보다 훨씬 낮을 수 있습니다.
비활성화된 경우 로봇은 포스 제어 애플리케이션 등에서 리스트 조인트로 더 높은 푸시 포스를 사용할 수 있습니다. 이 기능이 비활성화된 경우 로봇의 리스트, 페이로드 및 하단 암 사이에 끼이는 위험을 다른 수단으로 줄여야 합니다. 이 안전 기능은 모든 로봇에서 기본적으로 활성화되어 있습니다. PolyScope X 버전 10.12 이상에서는 이 안전 기능을 비활성화할 수 있습니다.
|
|
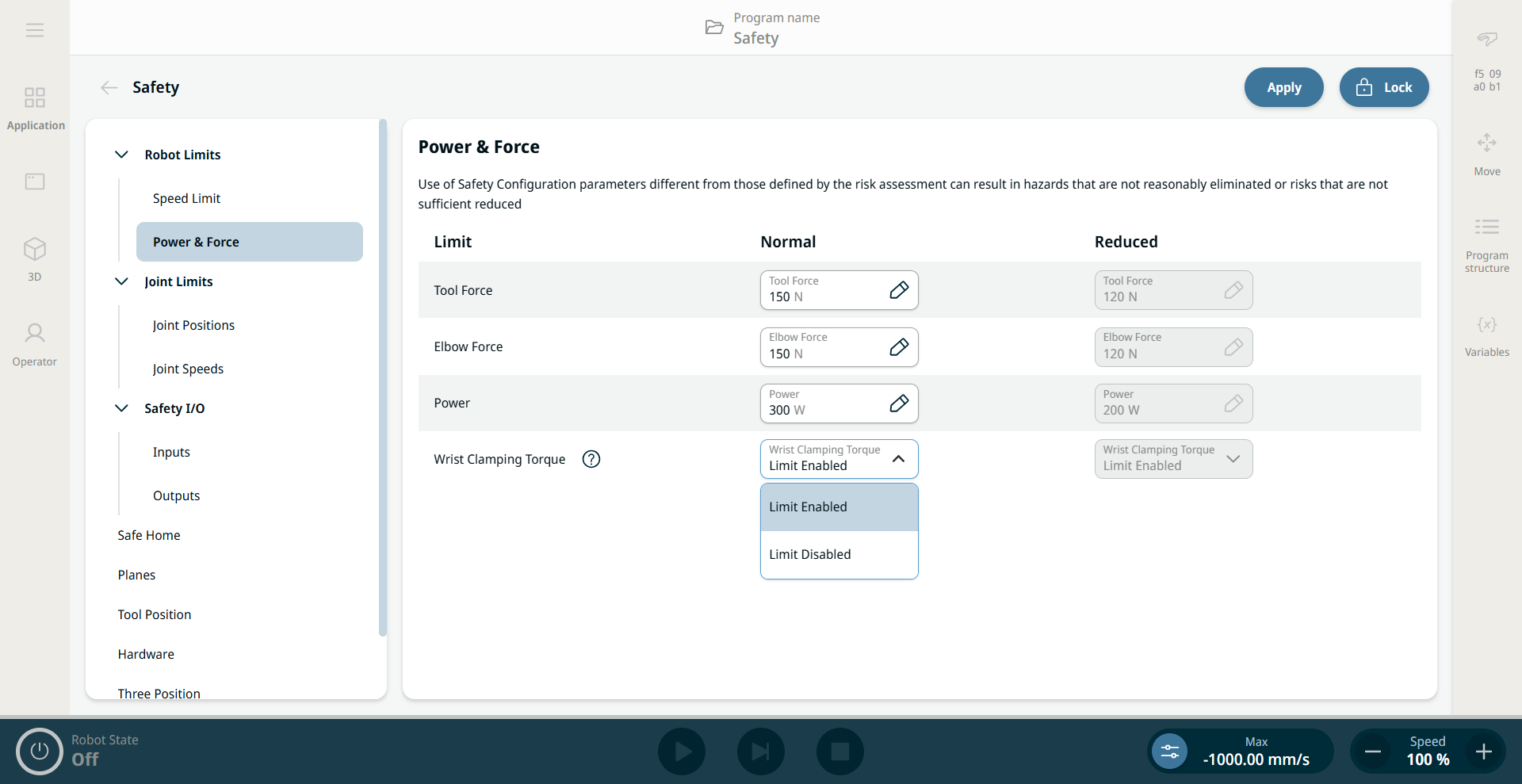
리스트 클램핑 토크 제한 활성화 및 비활성화 |
|