프레임을 이용한 안전 평면
| 설명 |
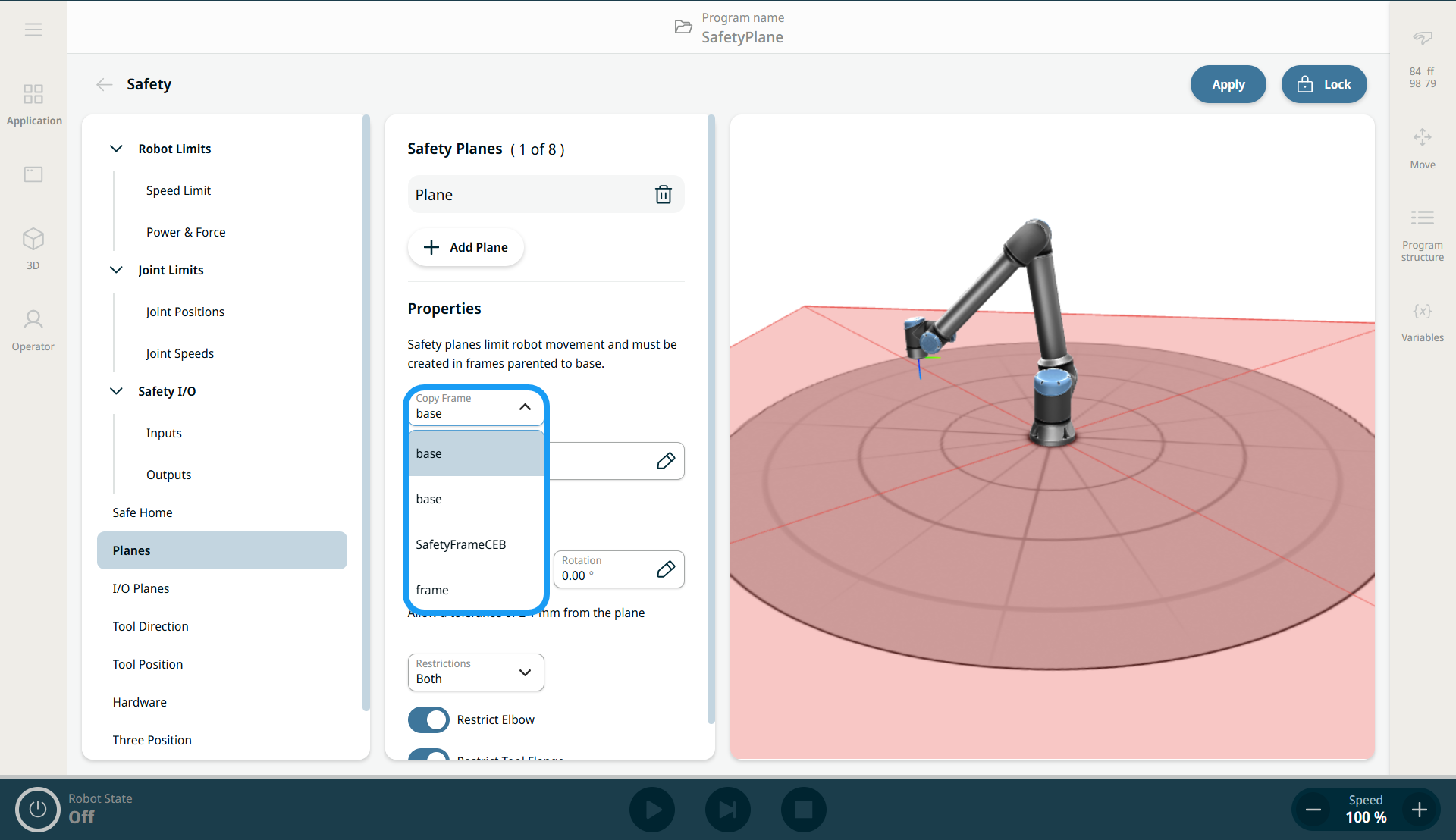
기존 프레임을 사용하여 안전 평면을 정의할 수 있습니다. 이를 통해 미리 정의된 위치 및 회전(X, Y, Z, RX, RY, RZ)을 기반으로 평면 매개변수를 보다 직관적으로 지정할 수 있습니다. 프레임 복사 드롭다운 메뉴에서 프레임을 선택하십시오.
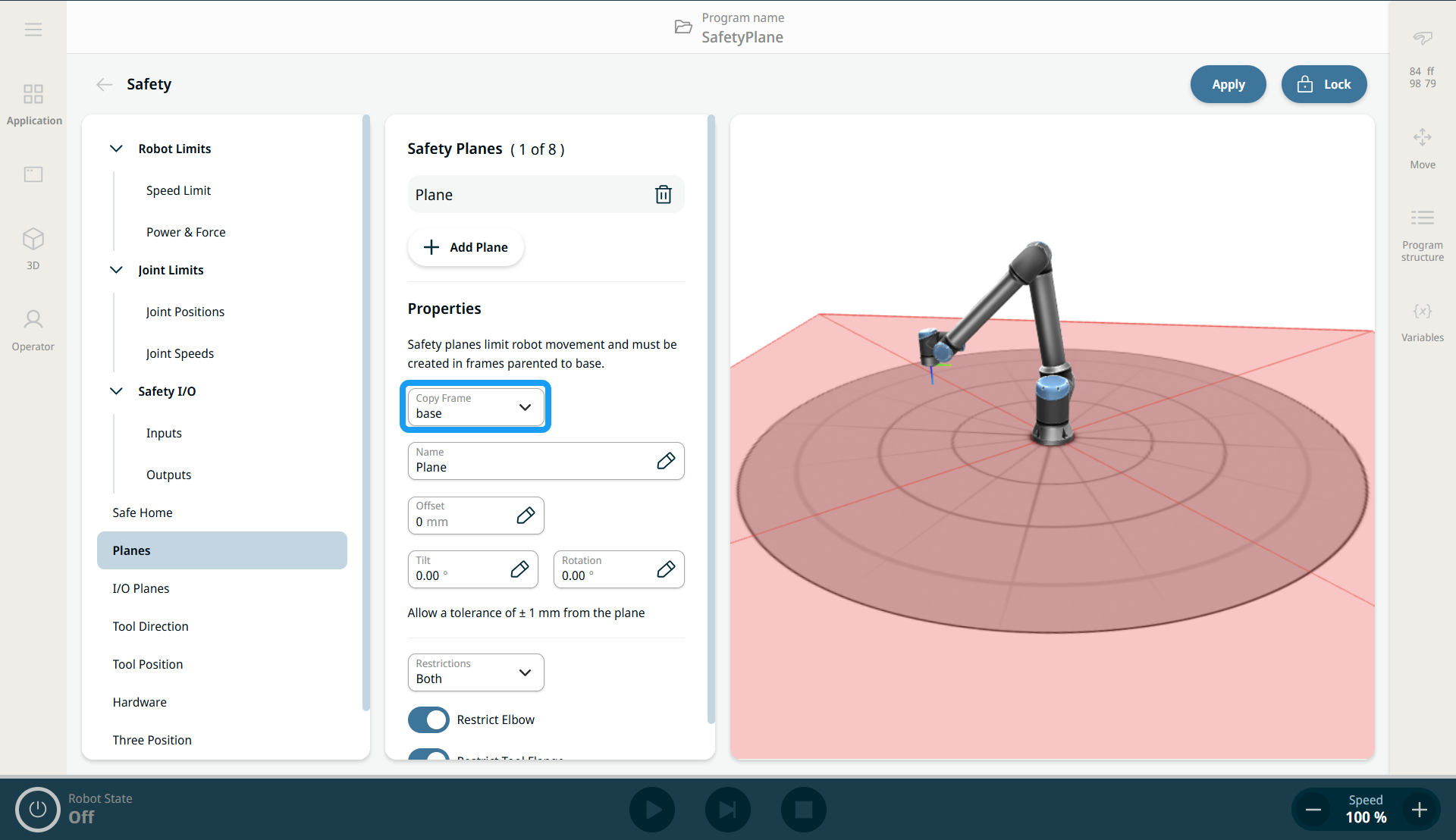
프레임 드롭다운 메뉴는 Planes 화면의 안전 평면 정의 매개변수에서 찾을 수 있습니다. 이 목록에는 프레임 화면에 정의된 프레임이 포함되어 있습니다. 프레임을 선택하면 해당 프레임이 안전 평면 정의로 사용됩니다. 오프셋, 틸트 및 회전 매개변수를 지정하면, 해당 매개변수는 선택된 프레임에 적용됩니다("안전 평면 구성" 참조). 결과적으로 생성된 안전 평면은 모든 매개변수를 통합합니다.
|
|
|
소프트웨어 핸드북의 "프레임" 섹션을 참조하십시오. |
|
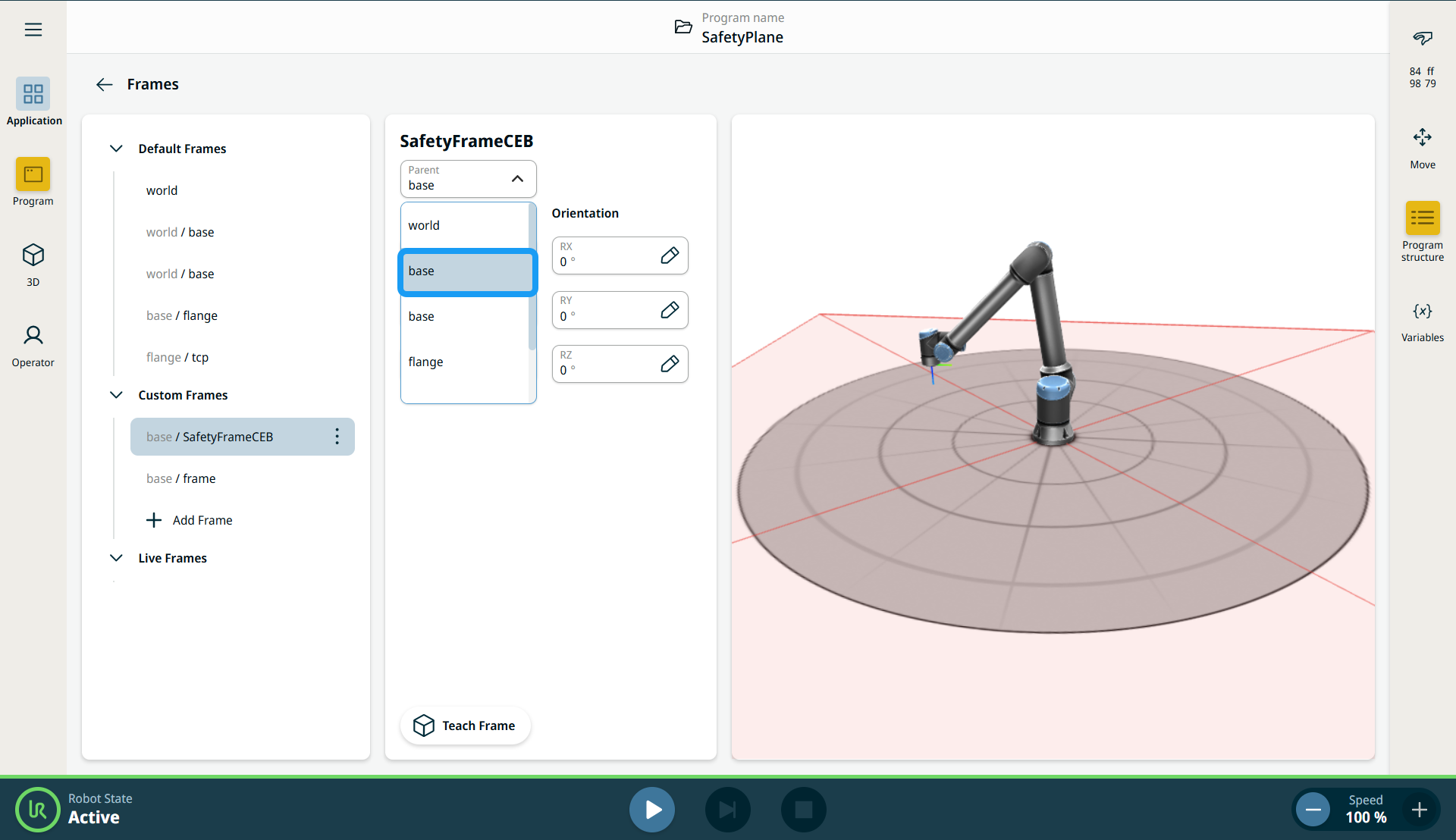
프레임 생성 |
|
|
|
안전 평면에서 기준 프레임 선택 |
|
|
|
|
|
|
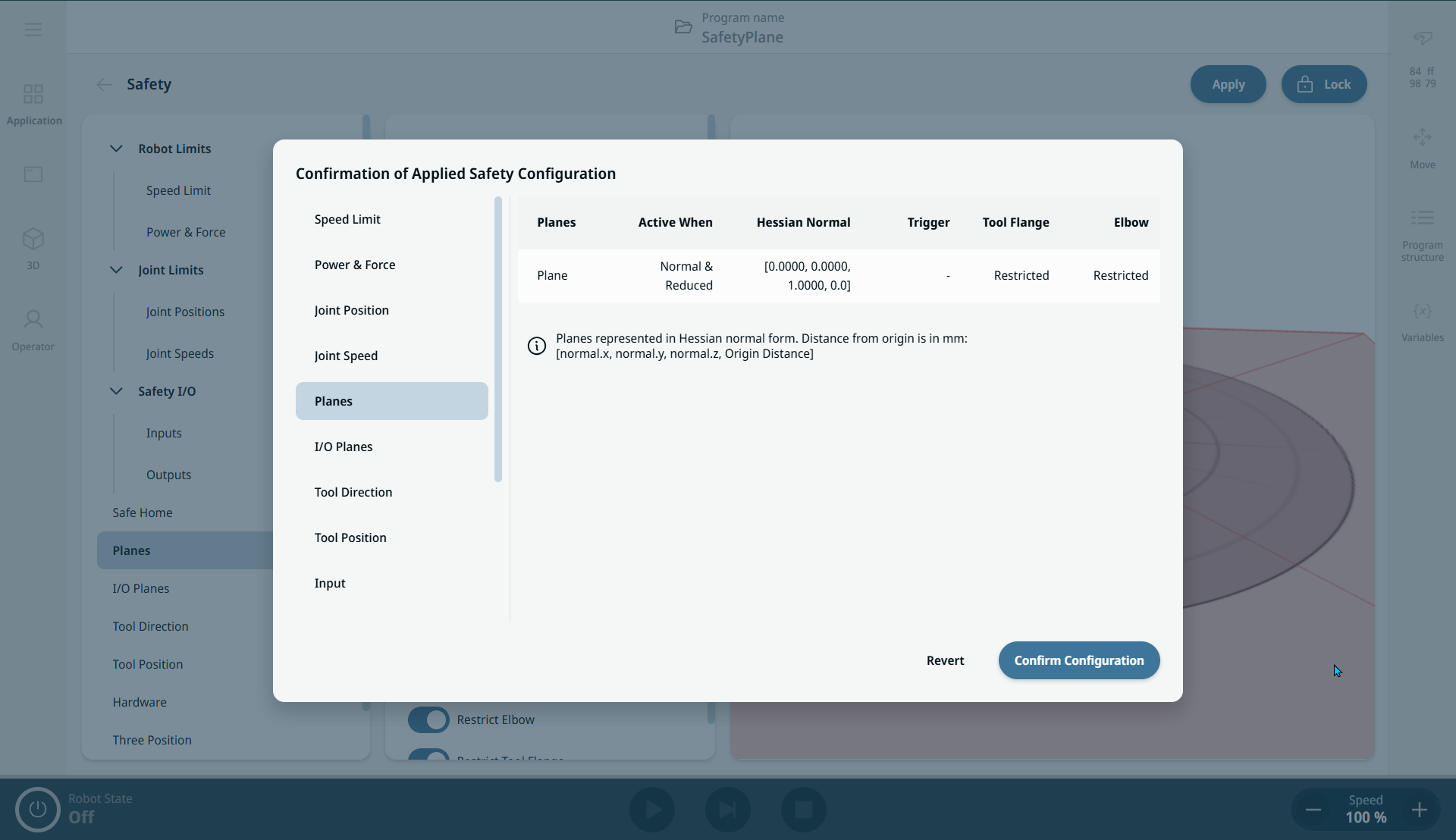
안전 평면에 사용되는 프레임은 예상과 달리 뒤집혀 있을 수 있습니다. 로봇이 평면의 위반 측에 위치해 있는 경우, 180도 기울기를 추가하십시오. 평면 구성, 엘보우 조인트 제한 및 툴 플랜지 제한에 대한 내용은 "안전 평면"을 참조하십시오.
|