直線移動
| 説明 |
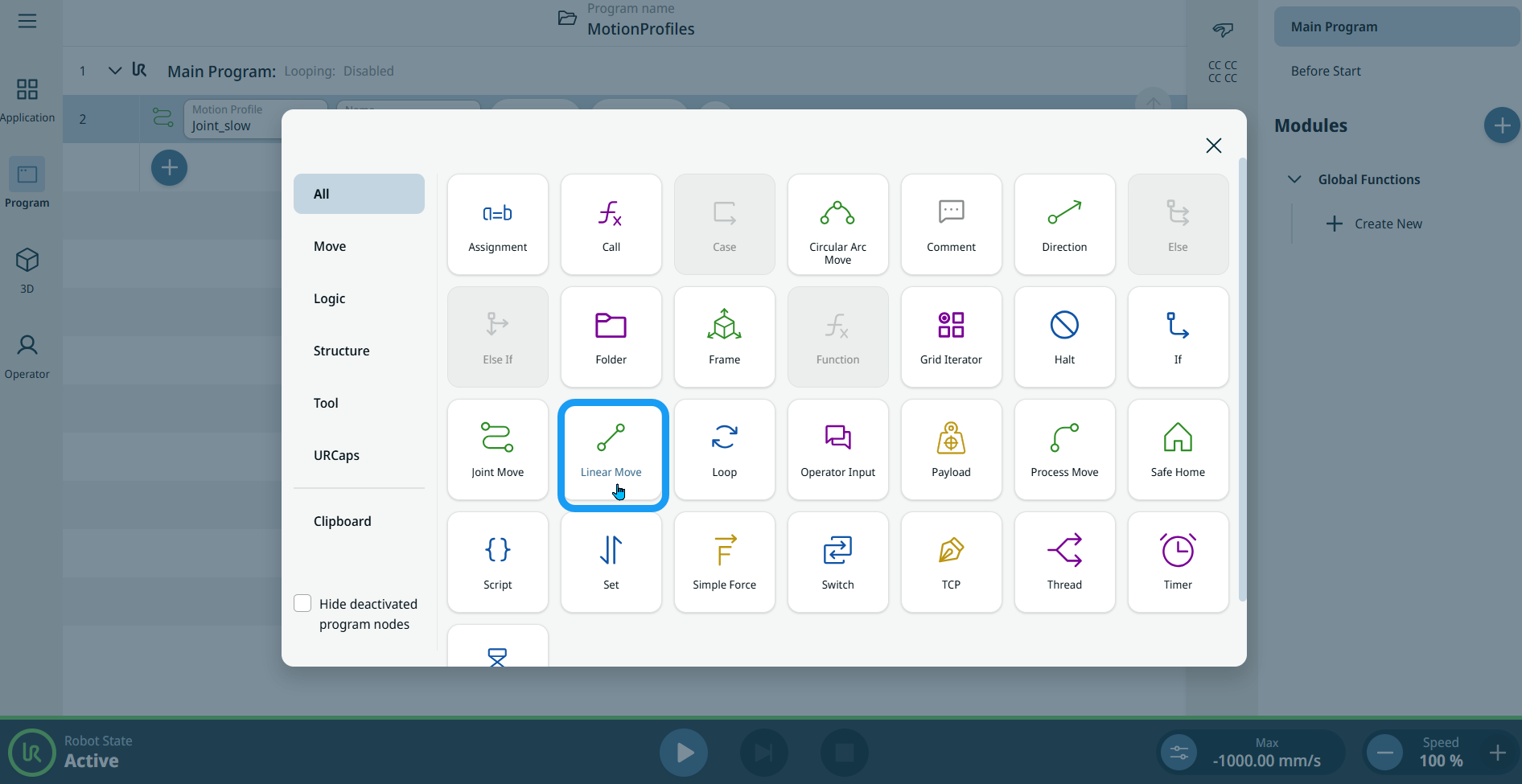
The Linear Move command node supports Motions Profiles as Joint Move, but it creates a movement that is a direct line from point A and point B. It moves the Tool Center Point (TCP) linearly between waypoints. これは、各ジョイントがより複雑な動きを実行して、ツールを直線経路に保つことを意味します。
|
|
To access Linear Move command |
|
|
|
|
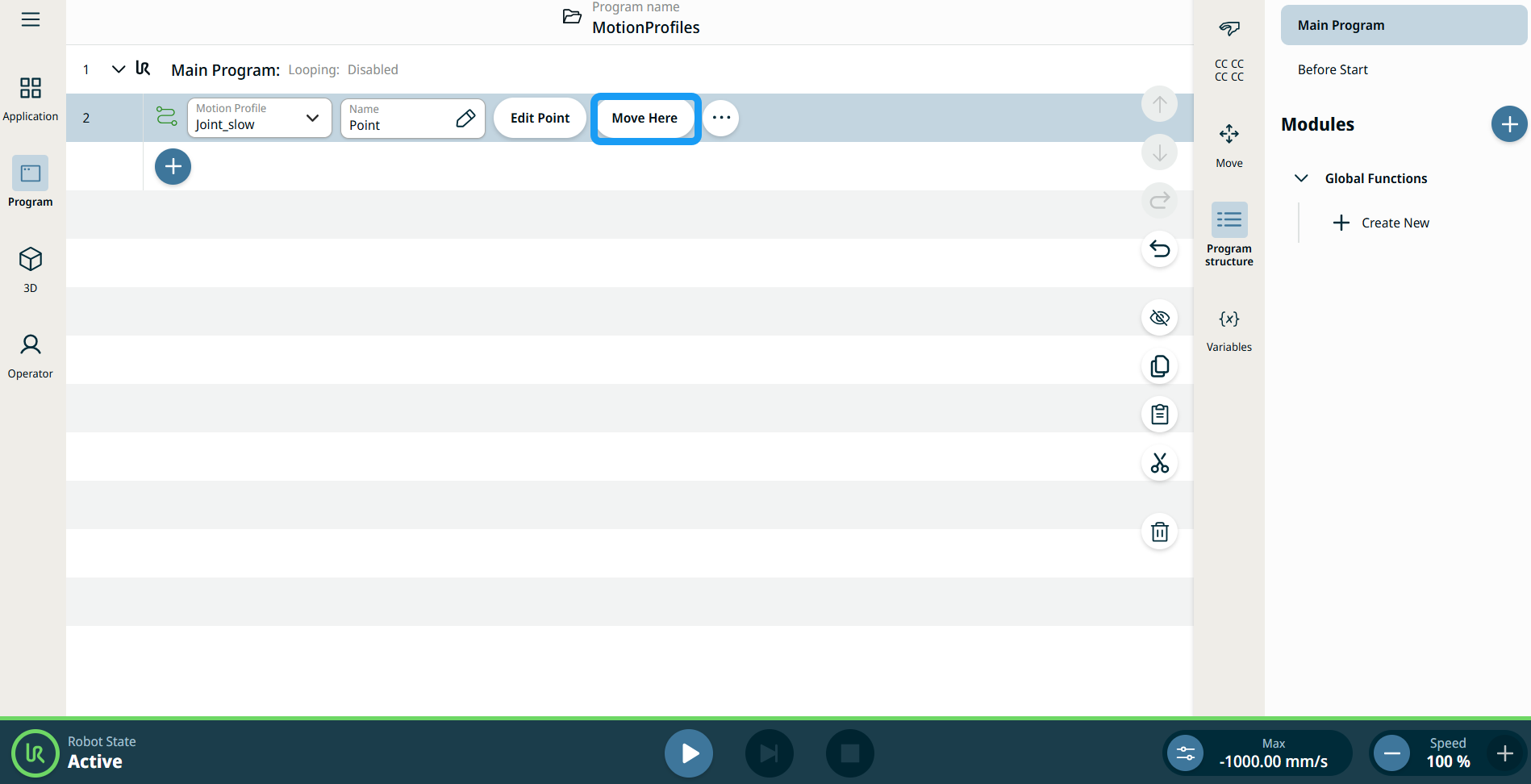
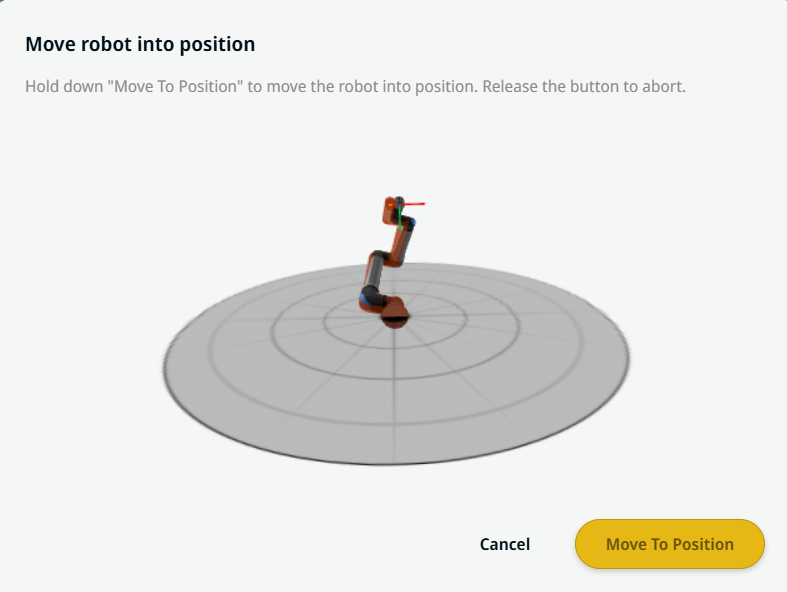
| [ここに移動] ボタンの使用 |
ここに移動 ボタンは、直線移動 および ジョイント移動 コマンドに表示されます。 この機能により、プログラムツリーから直接ウェイポイントの位置へ移動できます。 [ここに移動] ボタンを押すと、「ロボットを位置まで移動」ダイアログが開きます。 このボタンはウェイポイントが教示されている場合に表示され、ロボットの状態が 標準 モードまたは 減少 モードのときのみ有効になります。
|
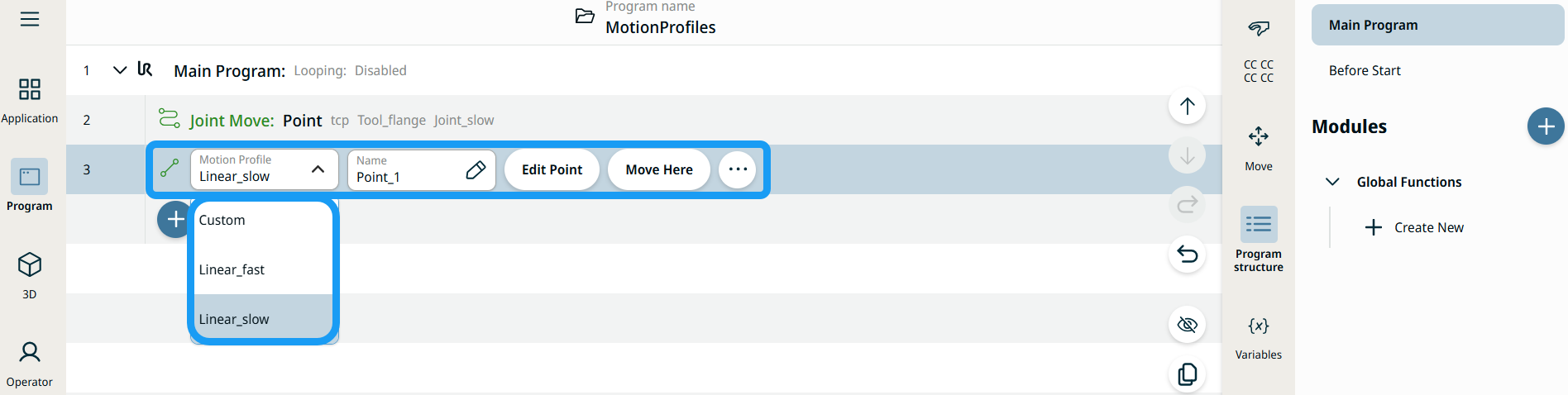
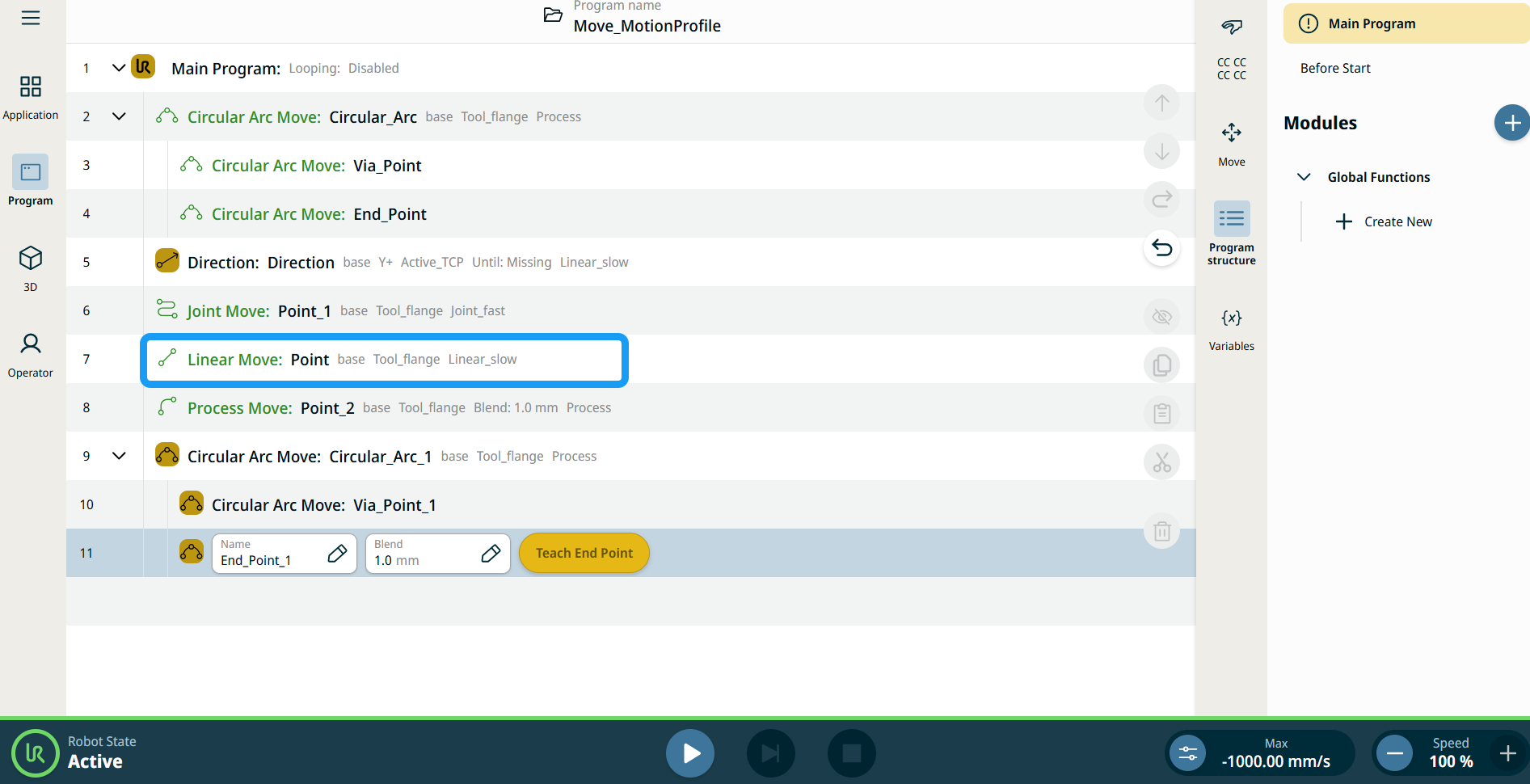
| 移動ノードのモーションプロファイルラベル |
プログラムツリー内のすべての移動関連コマンドノードには、各ノードに関連付けられた移動プロファイルが表示されます。 この機能により、移動ノードで選択されている移動プロファイルを確認できます。 この機能は以下のコマンドノードに実装されています: カスタムモーションプロファイルを使用する移動ノードでは、モーションプロファイルの代わりに速度と加速度の値が表示されます。 |
|
|
|
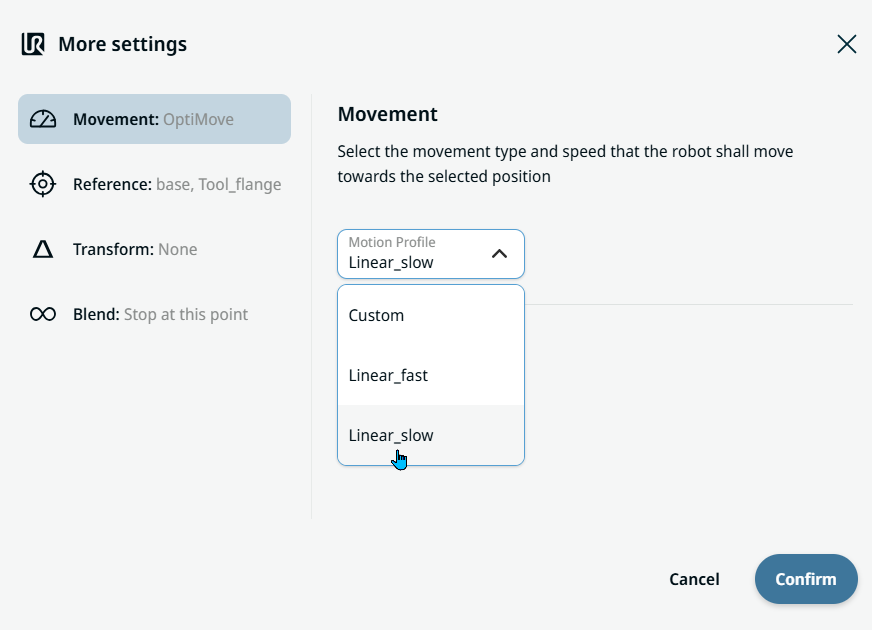
| Movement setting |
|
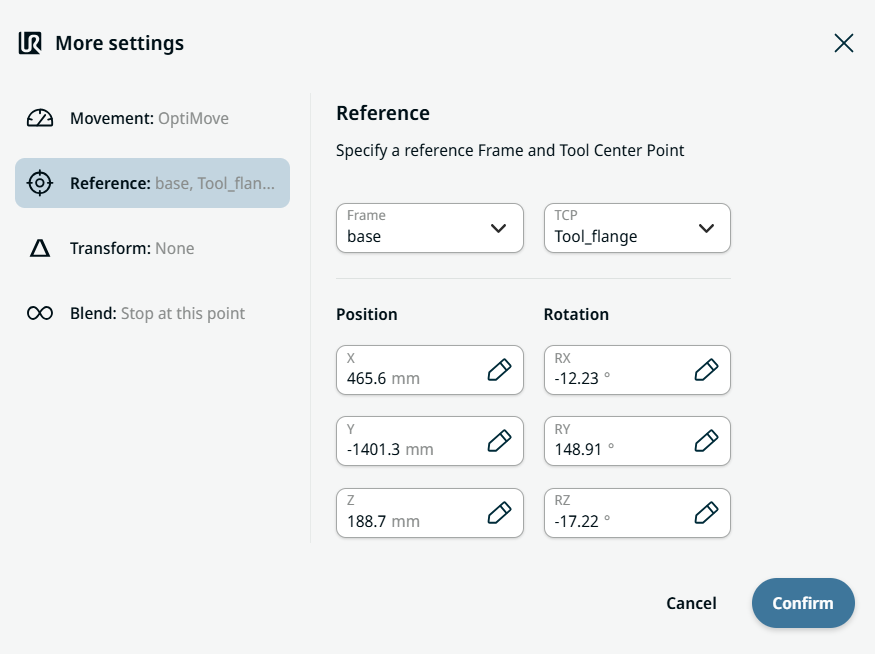
| Reference setting |
|
| Transform setting |
|
|
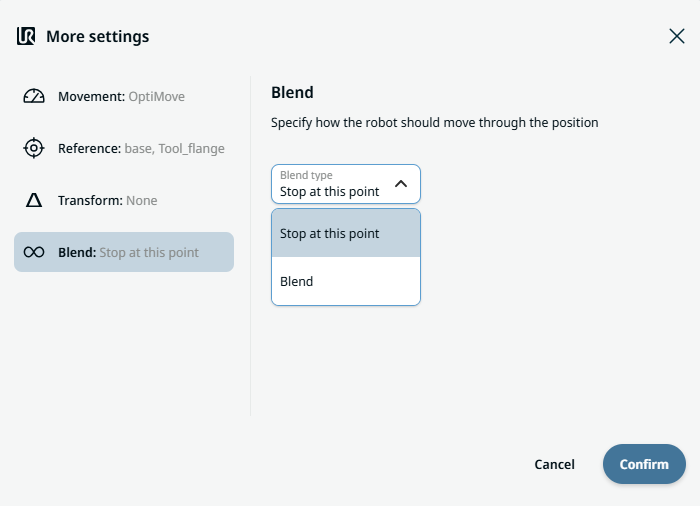
Blend setting |
|