Piani I/O
| Descrizione |
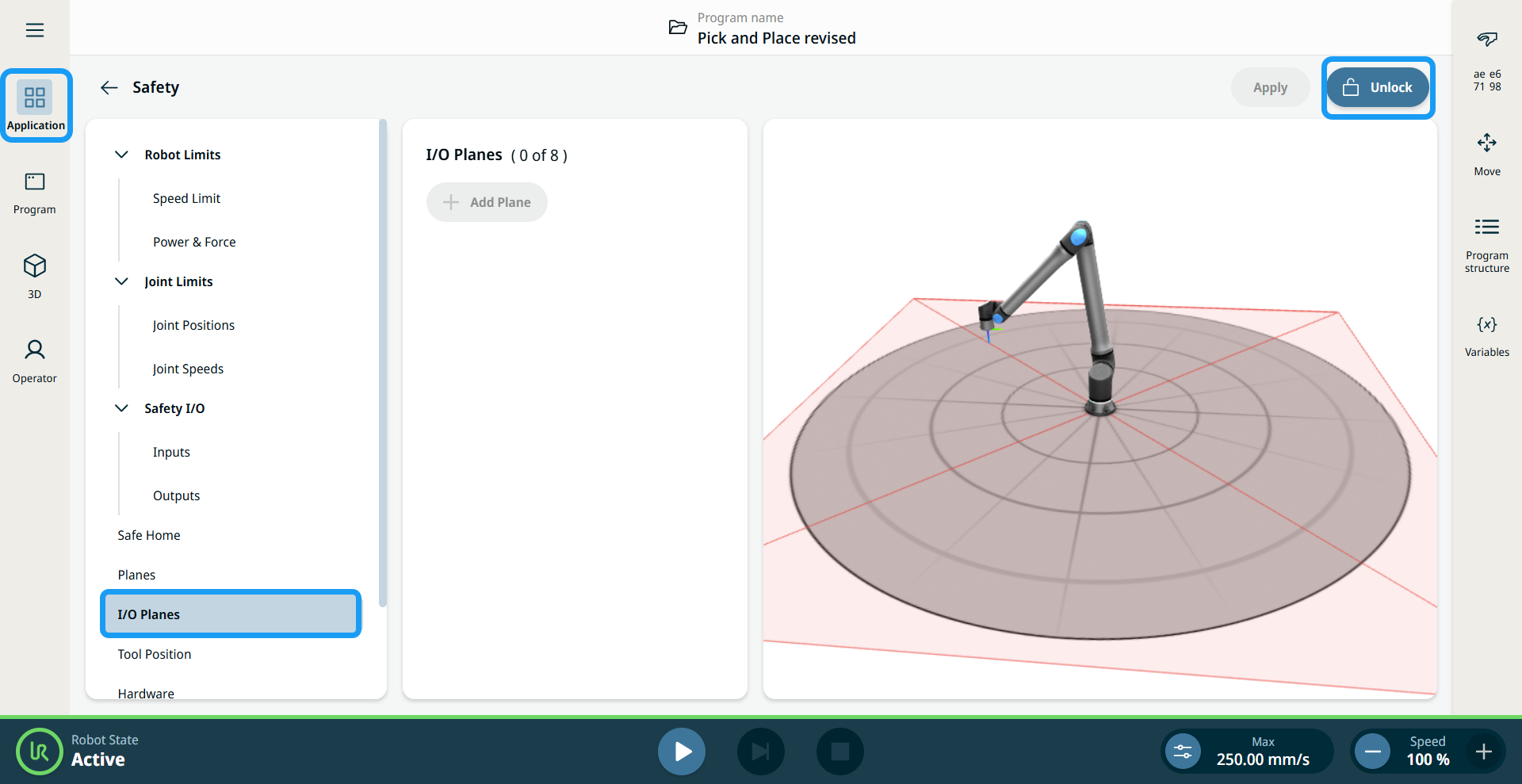
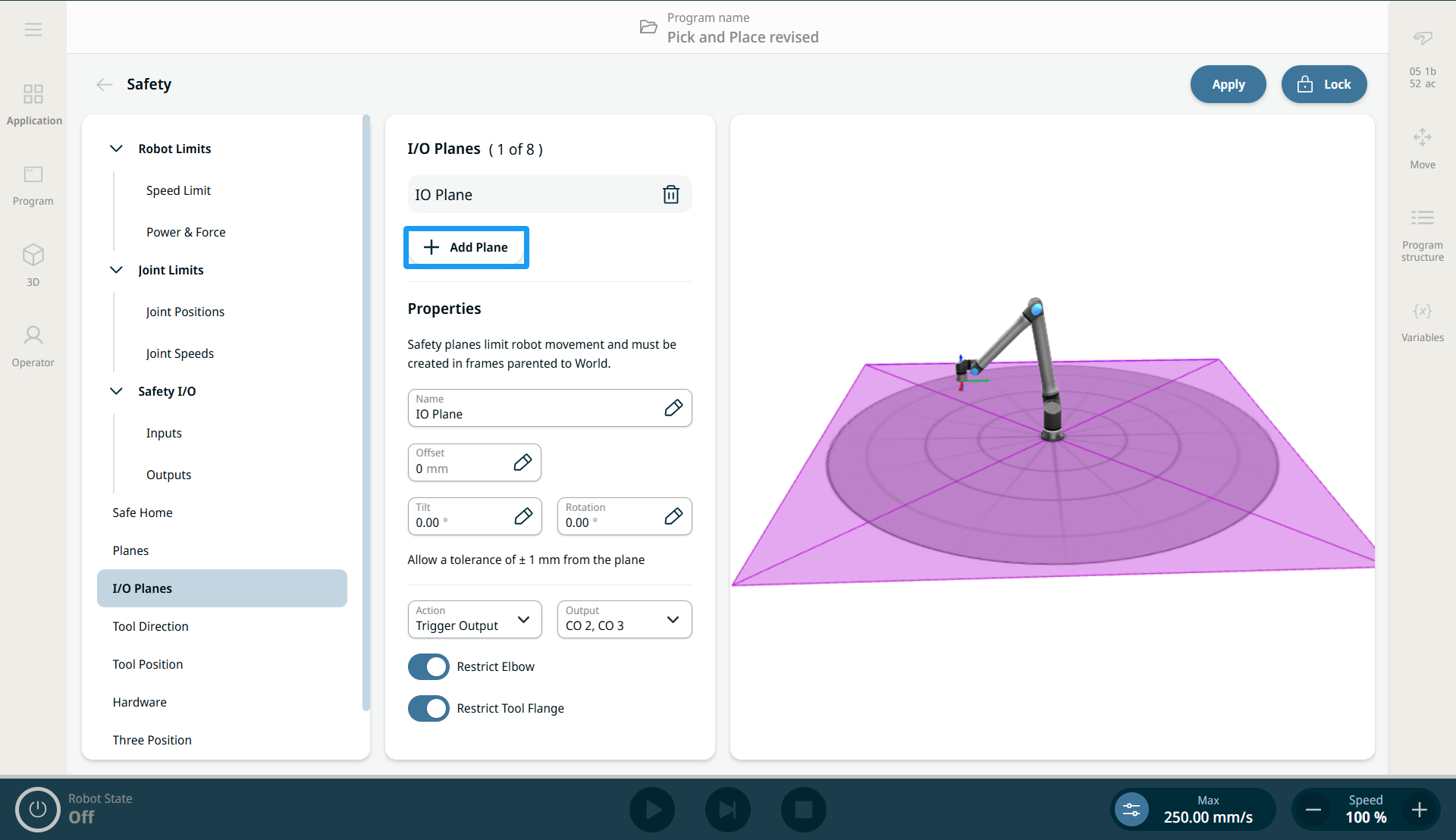
La funzione Piani di I/O consente un uso più flessibile dei piani di sicurezza rispetto allo standard. Piani di sicurezza funzionalità. Consente di attivare e disattivare i piani di sicurezza utilizzando gli ingressi dei terminali e/o di generare un segnale di uscita quando le sfere di sicurezza attraversano un piano di sicurezza.
|
|
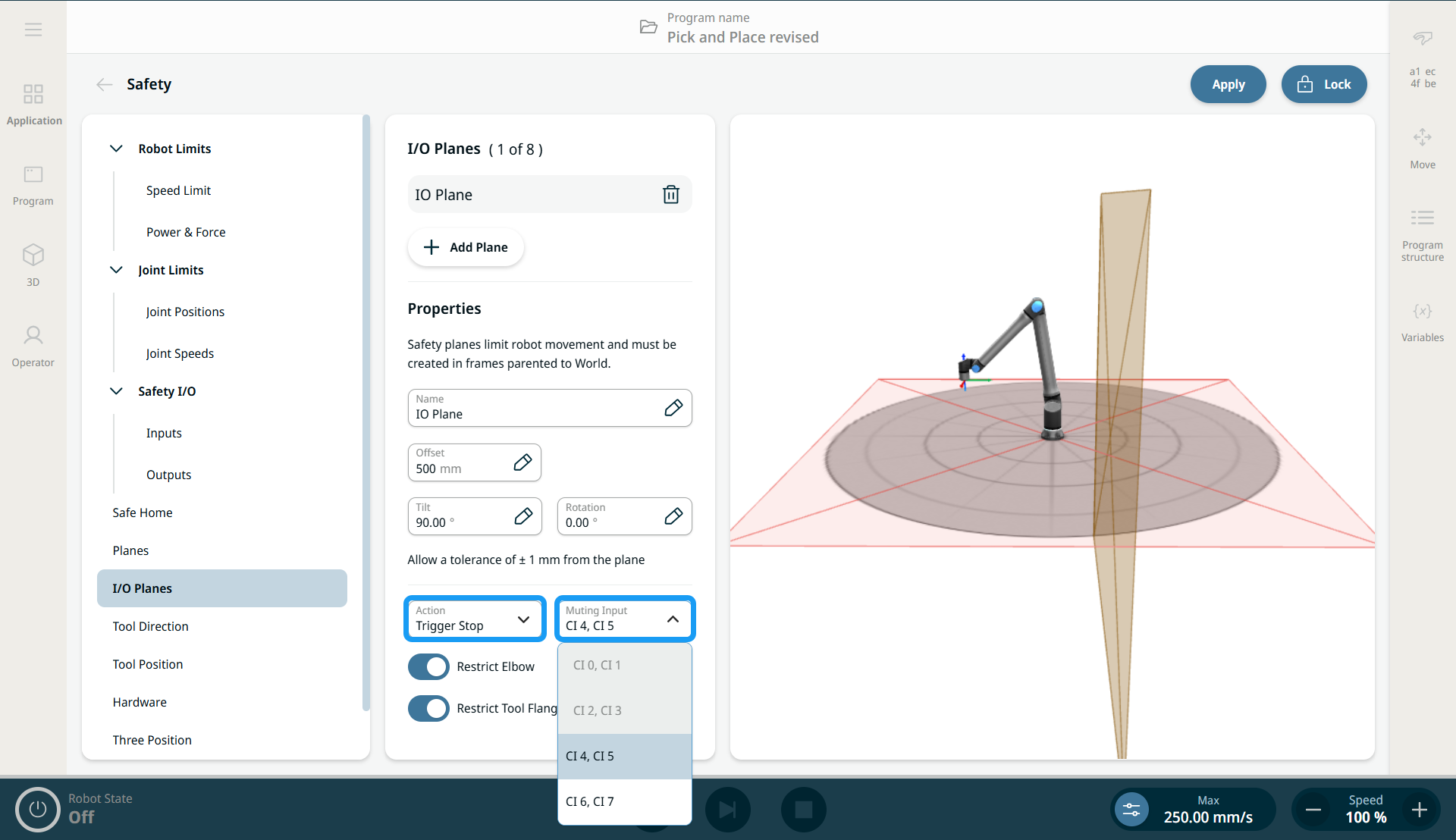
Piano di ingresso/arresto |
Trigger Stop attiva l'arresto di un piano I/O. Può essere disattivato tramite un ingresso di sicurezza. A meno che non sia silenziato, il movimento verso l'aereo fa sì che il robot si fermi e attenda finché l'ingresso di sicurezza non disattivi l'aereo. Quando il piano è inattivo, il robot può muoversi liberamente. Quando il piano è attivo e il robot non l'ha attraversato, si ferma prima di attraversarlo. Se il piano viene attivato, mentre il robot si muove sul bordo del piano, il robot può finire per attraversare il piano e nel peggiore dei casi si fermerà in base ai limiti di distanza e di tempo di arresto configurati. Quando il piano viene attivato e il robot lo attraversa, si ferma in base alla distanza e al tempo di arresto configurati.
|
|
|
|
|
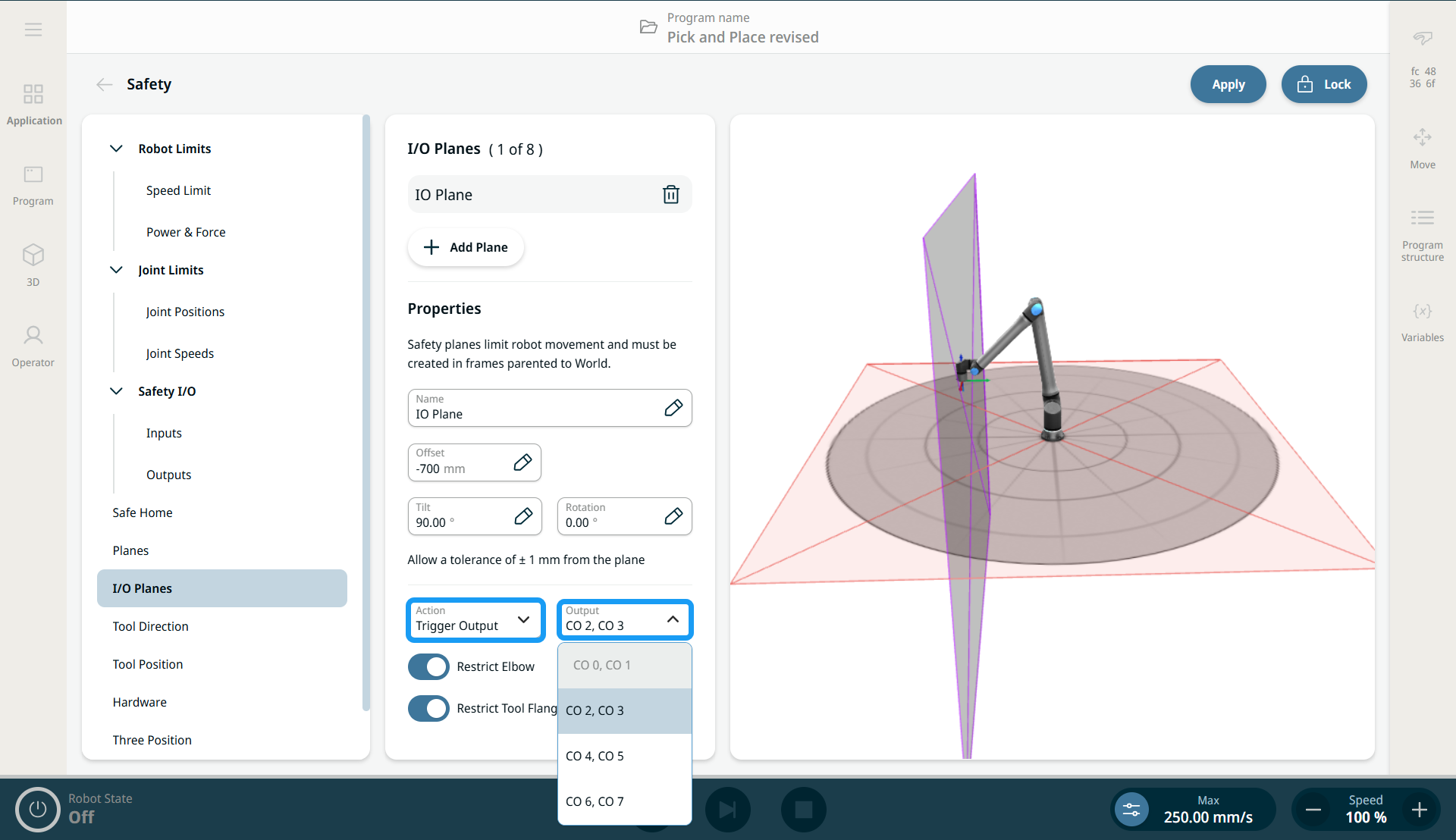
Piano di uscita |
Trigger Output genera un'uscita di sicurezza in base all'attraversamento del piano da parte di una o più sfere di sicurezza. Quando una o più sfere di sicurezza hanno attraversato un piano definito come uscita di attivazione, viene attivata l'uscita di sicurezza corrispondente a quel piano. "Attivato" significa che le uscite di sicurezza sono impostate elettricamente su "Basso". Quando una delle sfere di sicurezza attraversa un piano definito come uscita di attivazione, viene attivata l'uscita di sicurezza corrispondente a quel piano.
|