I/O di sicurezza
| Descrizione |
Gli I/O sono divisi in ingressi e uscite e sono abbinati in modo che ciascuna funzione fornisca una capacità PLd di categoria 3.
Quando si avviano programmi da un ingresso I/O o fieldbus, il robot può iniziare il movimento dalla posizione corrente, non ci sarà alcun movimento manuale al primo punto percorso tramite PolyScope richiesto.
|
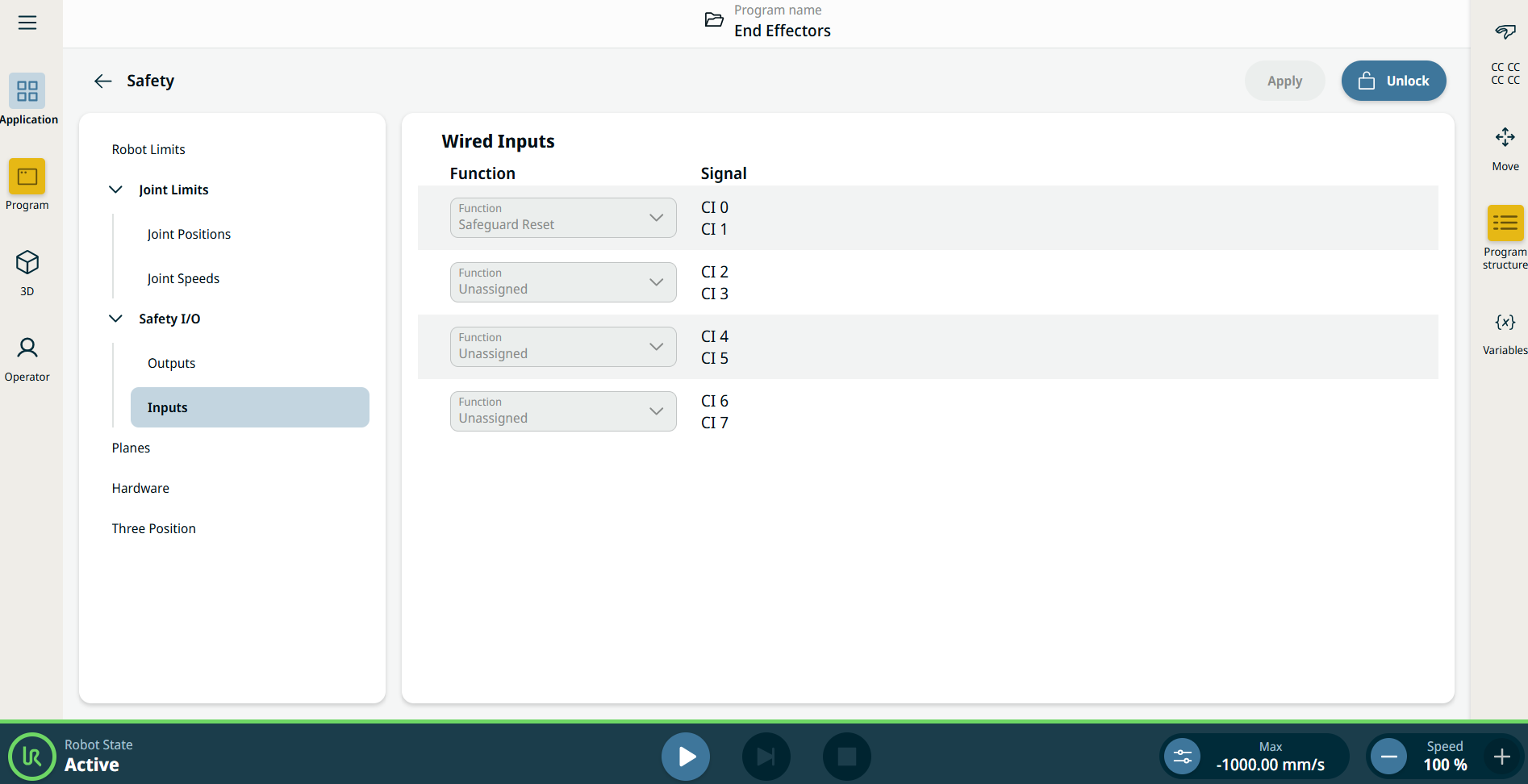
| Ingressi unità di controllo |
Gli ingressi sono descritti nella tabella sottostante:
Quando il ripristino predefinito dell'arresto di sicurezza è disabilitato, si verifica un reset automatico quando l'arresto di sicurezza non attiva più un arresto. Ciò può accadere se una persona attraversa il campo dell'arresto di sicurezza. Se una persona non viene rilevata dall'arresto di sicurezza e la persona è esposta a pericoli, il reset automatico è vietato dalle norme.
Quando l'arresto di sicurezza in modalità automatica è abilitato, l'arresto di sicurezza non viene attivato in modalità manuale.
|
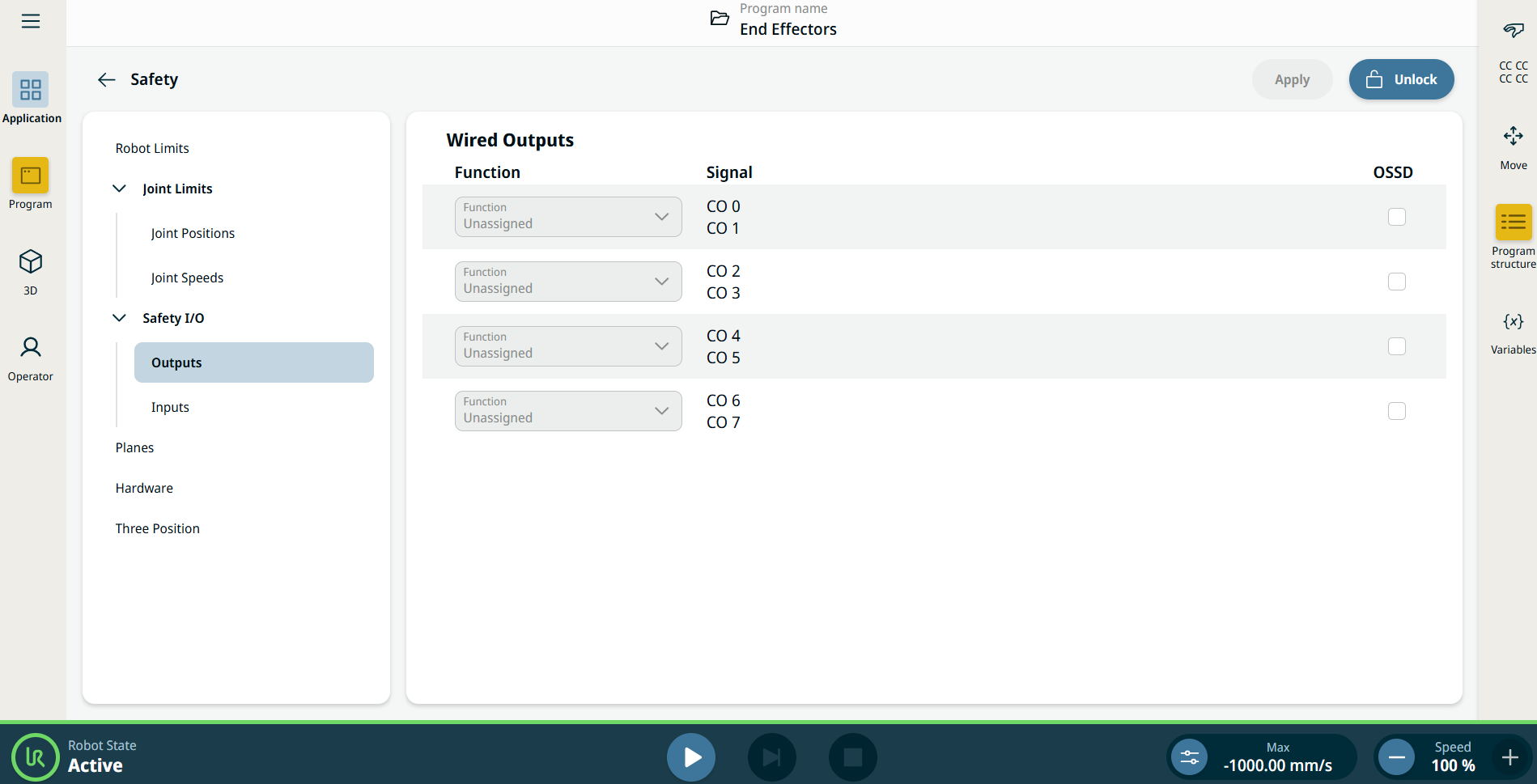
| Uscite dell'unità di controllo |
Tutte le uscite di sicurezza si abbassano in caso di violazione o anomalia del sistema di sicurezza. Ciò significa che l'uscita di arresto di sistema avvia un arresto anche quando non viene attivato un E-stop. È possibile utilizzare i seguenti segnali di uscita delle funzioni di sicurezza. Tutti i segnali ritornano a basso al termine dello stato che ha provocato il segnale alto:
I macchinari esterni che ricevono lo stato di arresto di emergenza dal robot attraverso l’uscita di arresto di sistema devono essere conformi con ISO 13850. Ciò è necessario in particolare per impianti in cui l’ingresso di arresto di emergenza del robot è collegato a un dispositivo di arresto di emergenza esterno. In questi casi, l’uscita di arresto di sistema passa a alta quando il dispositivo di arresto di emergenza esterno viene resettato. Ciò implica che lo stato di arresto di emergenza del macchinario esterno verrà resettato senza richiedere un intervento manuale da parte dell’operatore del robot. Pertanto, per rispettare gli standard di sicurezza, il macchinario esterno deve richiedere un’azione manuale per riprendere l’attività.
|