Plans d'E/S
| Description |
La fonction Plans d'entrée/sortie permet une utilisation plus souple des plans de sécurité par rapport au plan standard. plans de sécurité standard. Il permet d'activer et de désactiver les plans de sécurité à l'aide d'entrées terminales et/ou de générer un signal de sortie lorsque les sphères de sécurité traversent un plan de sécurité.
|
|
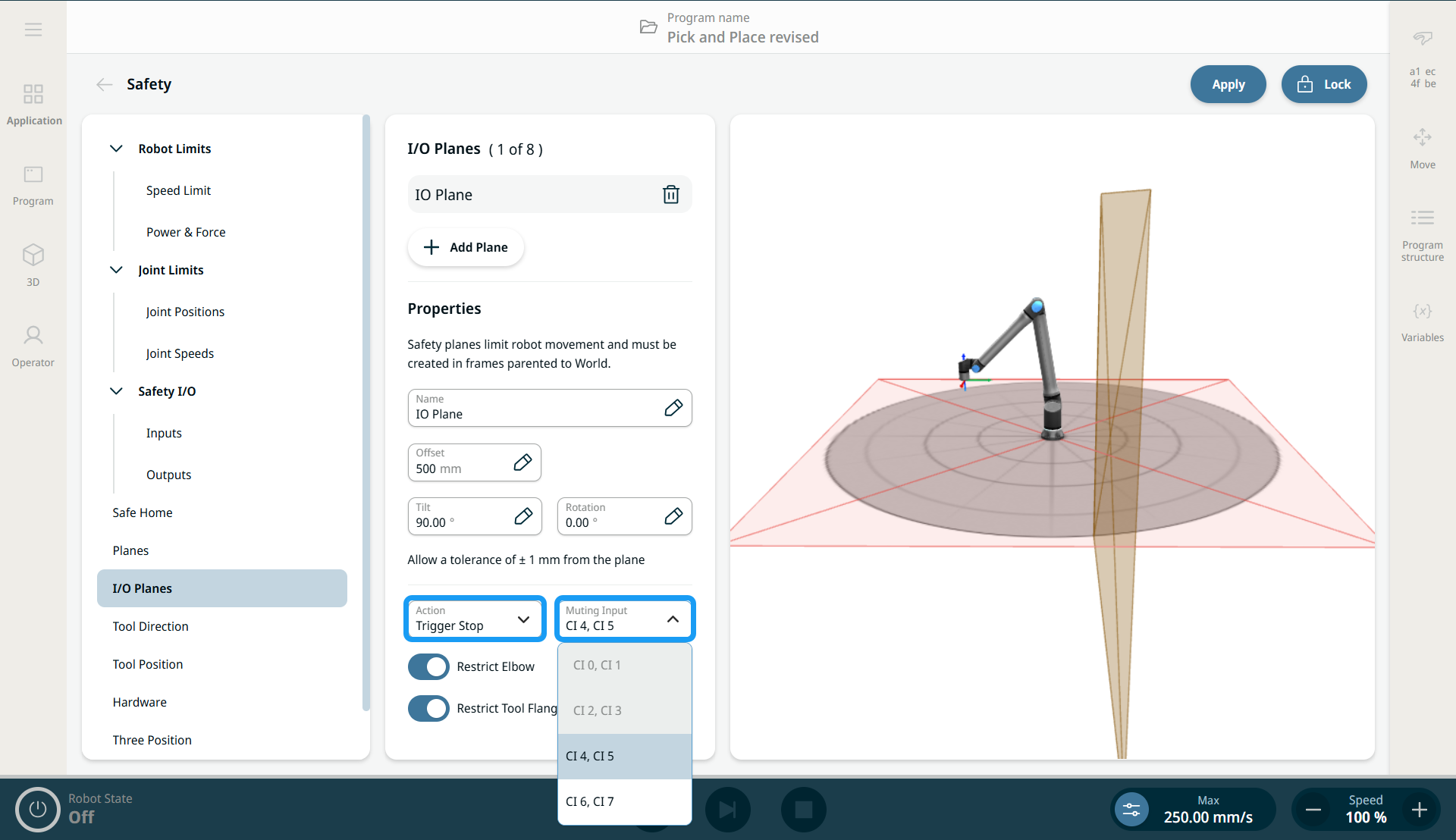
Plan d'entrée et d'arrêt |
Trigger Stop déclenche l'arrêt d'un plan d'E/S. Il peut être mis en sourdine à l'aide d'une entrée de sécurité. S'il n'est pas désactivé, le robot s'arrête lorsqu'il se rapproche de l'avion et attend que l'entrée de sécurité désactive l'avion. Lorsque le plan est inactif, le robot peut se déplacer librement. Lorsque le plan est actif et que le robot n'a pas traversé le plan, le robot s'arrête avant de traverser le plan. Si le plan est activé alors que le robot se déplace sur le bord du plan, le robot peut finir par traverser le plan et, dans le pire des cas, s'arrêtera conformément aux limites de distance et de temps d'arrêt configurées. Lorsque le plan est activé et que le robot a traversé le plan, le robot s'arrête en fonction des limites de distance et de temps d'arrêt configurées.
|
|
|
|
|
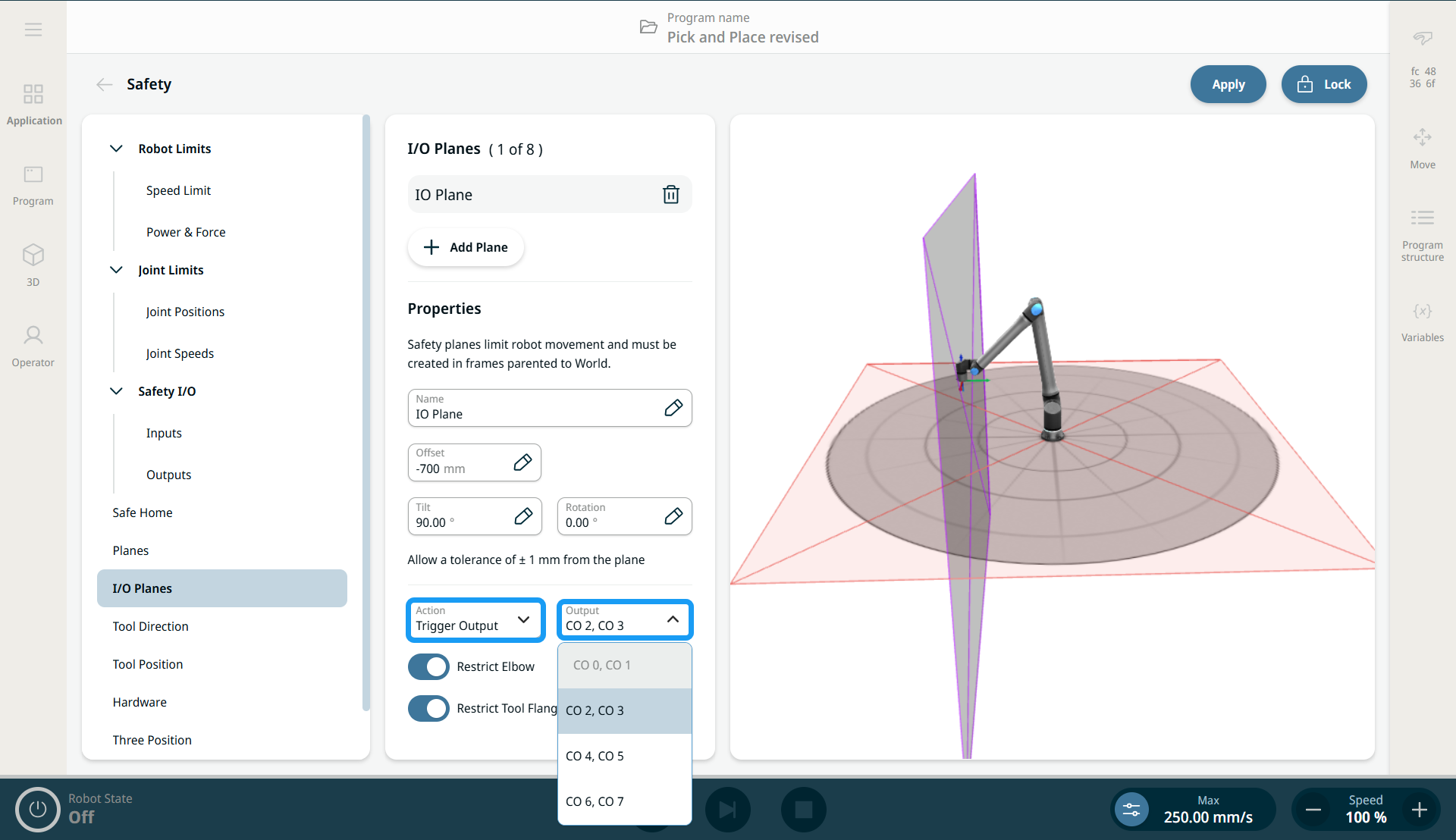
Plan de sortie |
Trigger Output (sortie de déclenchement ) génère une sortie de sécurité selon qu'une ou plusieurs sphères de sécurité ont traversé le plan. Lorsqu'une ou plusieurs sphères de sécurité ont traversé un plan défini comme sortie de déclenchement, la sortie de sécurité correspondant à ce plan est activée. "Activé" signifie que les sorties de sécurité sont électriquement réglées sur "Low". Lorsque l'une des sphères de sécurité a traversé un plan défini comme sortie de déclenchement, la sortie de sécurité correspondant à ce plan est activée.
|