E/S de sécurité
| Description |
Les E/S sont réparties entre les entrées et les sorties et sont associées de façon à ce que chaque fonction fournisse une capacité PLD de catégorie 3.
Lors du démarrage des programmes à partir d'une E/S ou d'une entrée de bus de terrain, le robot peut commencer le mouvement à partir de sa position, il n'y aura aucun mouvement manuel vers le premier point de passage via PolyScope requis.
|
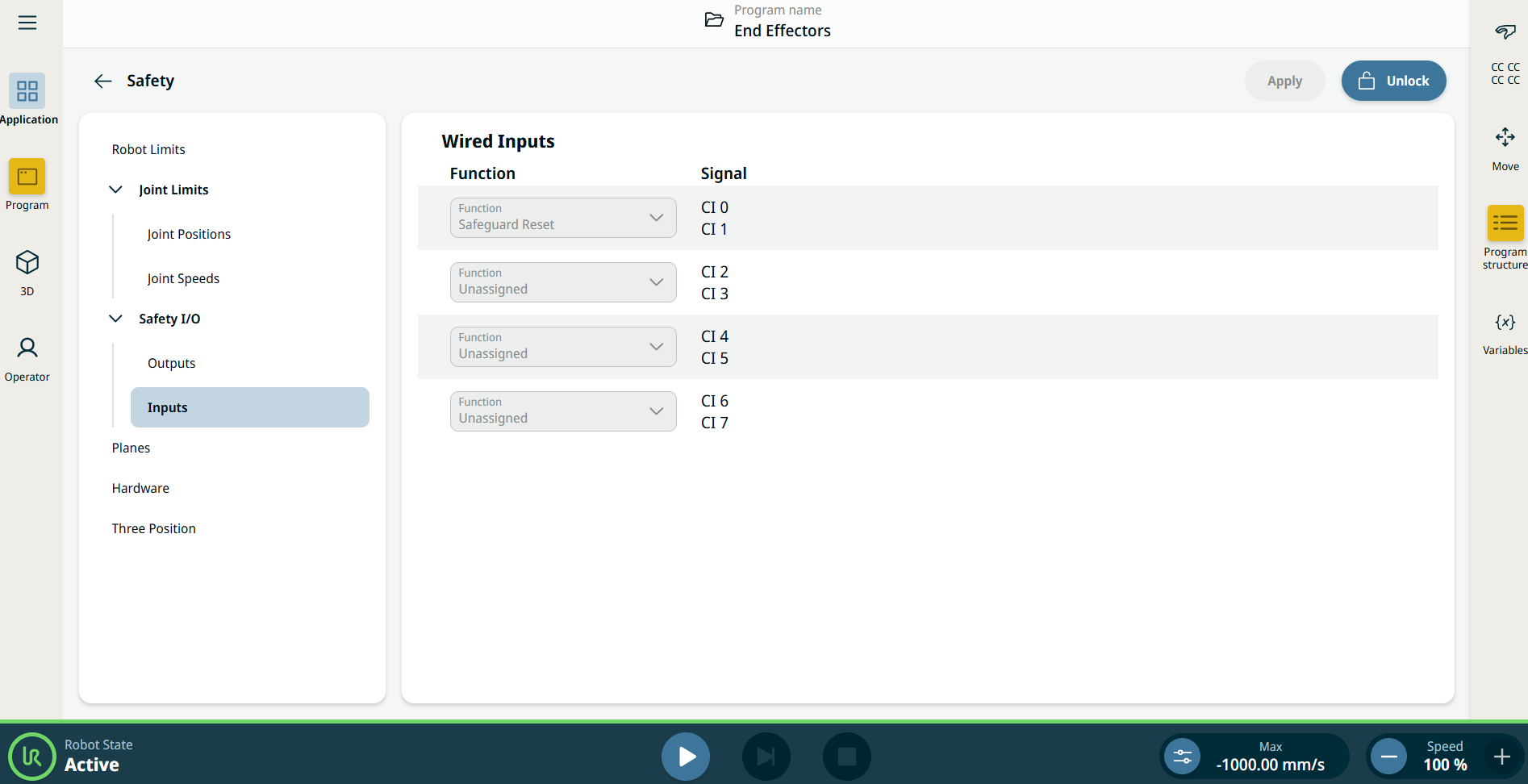
| Entrées du boîtier de commande |
Les entrées sont décrites dans le tableau ci-dessous :
Lorsque la réinitialisation par défaut de la Protection est désactivée, une réinitialisation automatique se produit lorsque la protection ne déclenche plus un arrêt. Cela peut se produire si une personne traverse le champ de la protection. Si une personne n'est pas détectée par la protection et qu'elle est exposée à des dangers, la réinitialisation automatique est interdite par les normes.
Lorsque Arrêt de protection du mode automatique est activé, un Arrêt de protection n'est pas déclenché en mode Manuel.
|
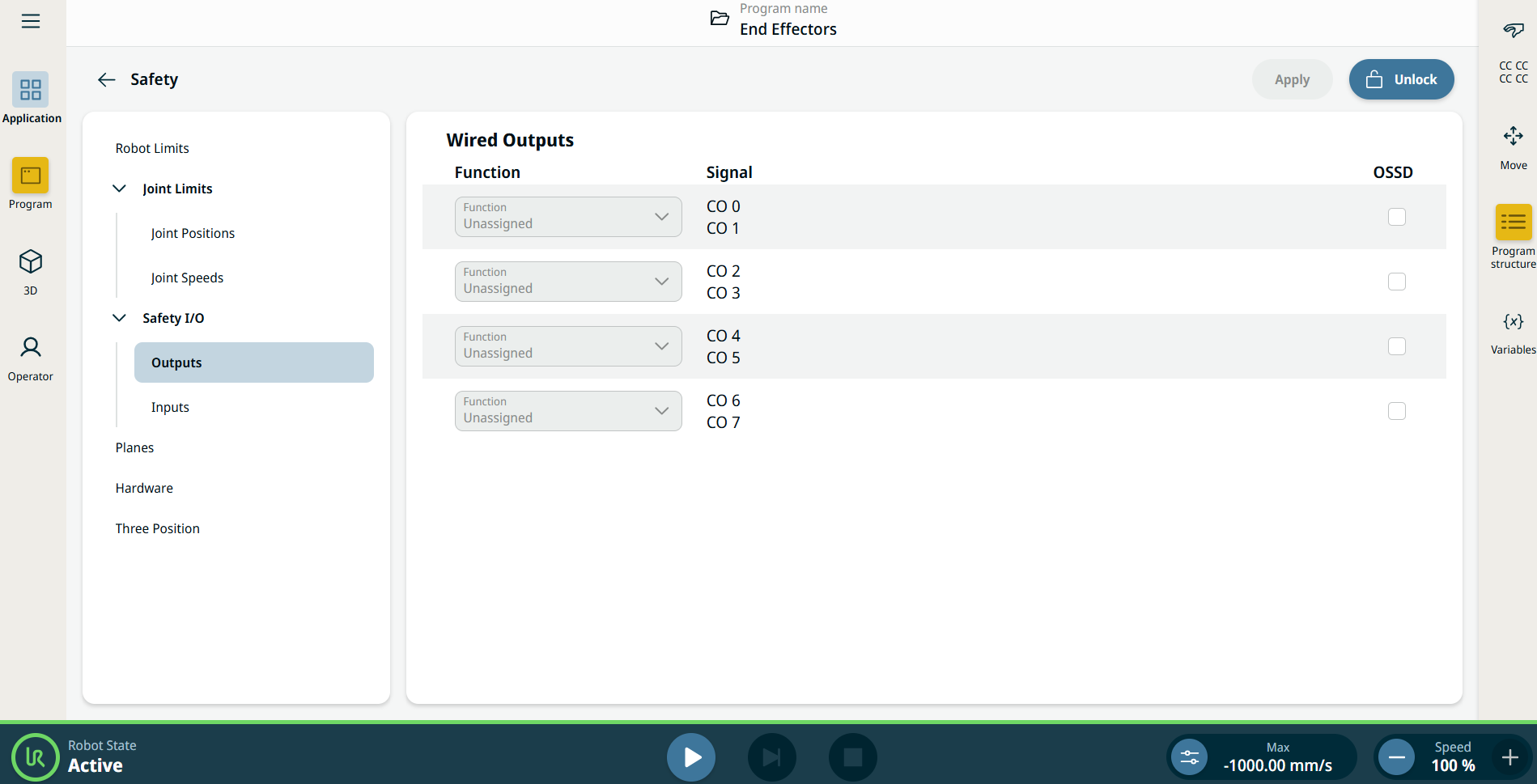
| Sorties du boîtier de commande |
Toutes les sorties de sécurité sont faibles en cas de violation ou de défaillance du système de sécurité. Cela signifie que la sortie Arrêt sustème déclenche un arrêt même lorsqu'un arrêt d'urgence n'est pas déclenché. Vous pouvez utiliser les signaux de sortie des fonctions de Sécurité suivantes. Tous les signaux redeviennent bas lorsque l'état qui a déclenché le signal élevé est terminé :
Les machines externes qui obtiennent l'état Arrêt d'urgence du robot par le biais de la sortie Arrêt système doivent être conformes à la norme ISO 13850. Ceci est plus particulièrement nécessaire dans les configurations où l’entrée Arrêt d’urgence robot est connectée à un dispositif d’arrêt d’urgence externe. Dans de tels cas, la sortie Arrêt système devient haut lorsque le dispositif d'arrêt d'urgence externe est relâché. Cela implique que l’état d’arrêt d’urgence sera réinitialisé au niveau de la machine externe sans action manuelle requise de la part de l’opérateur du robot. Par conséquent, pour être conforme aux normes de sécurité, la machine externe doit demander une action manuelle pour reprendre.
|