Werkzeugrichtung
|
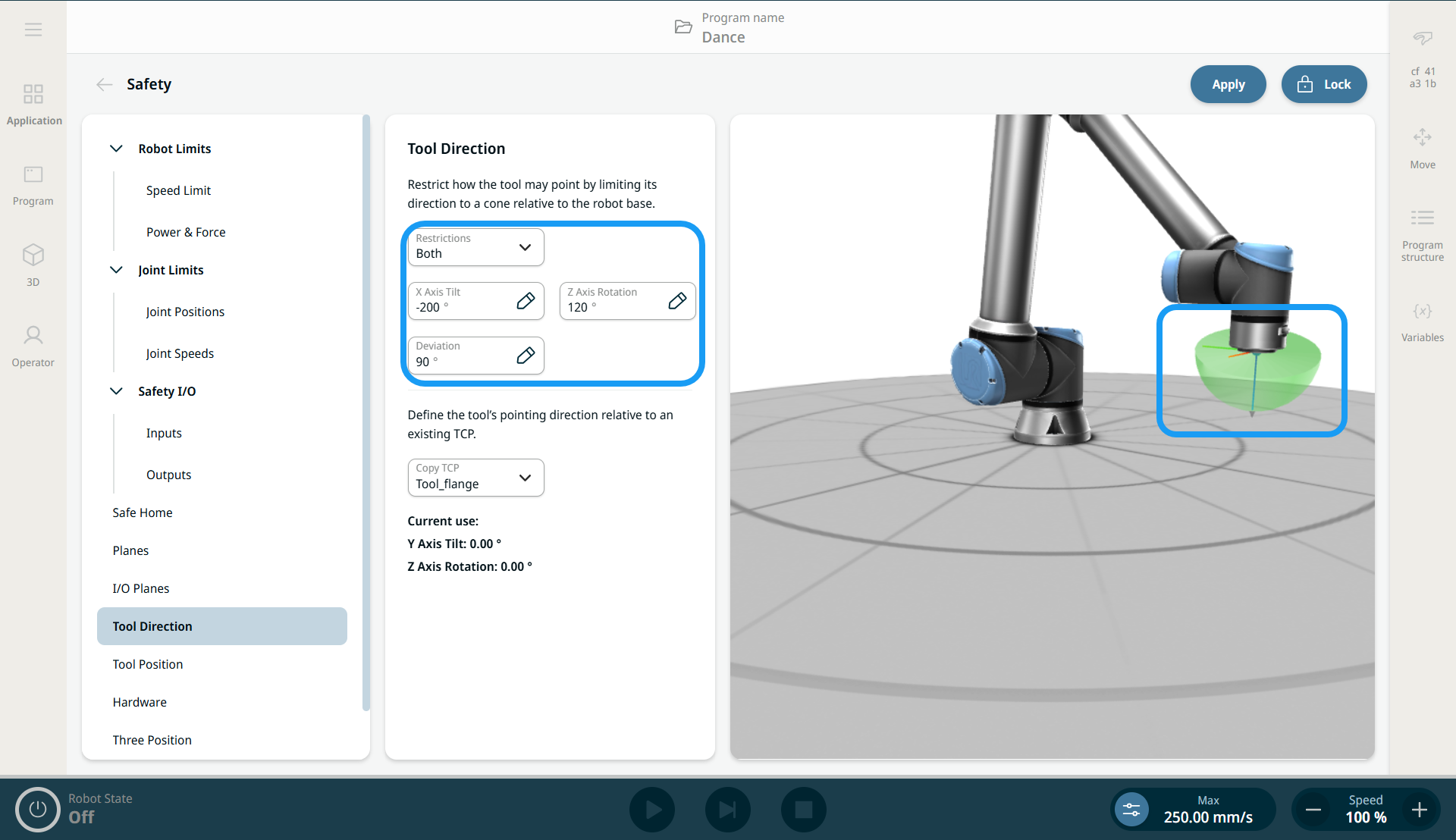
Standardmäßig zeigt das Werkzeug in die gleiche Richtung wie die Z-Achse des Werkzeug-Ausgangsflanschs. Sie können dies ändern, indem Sie zwei Winkel angeben:
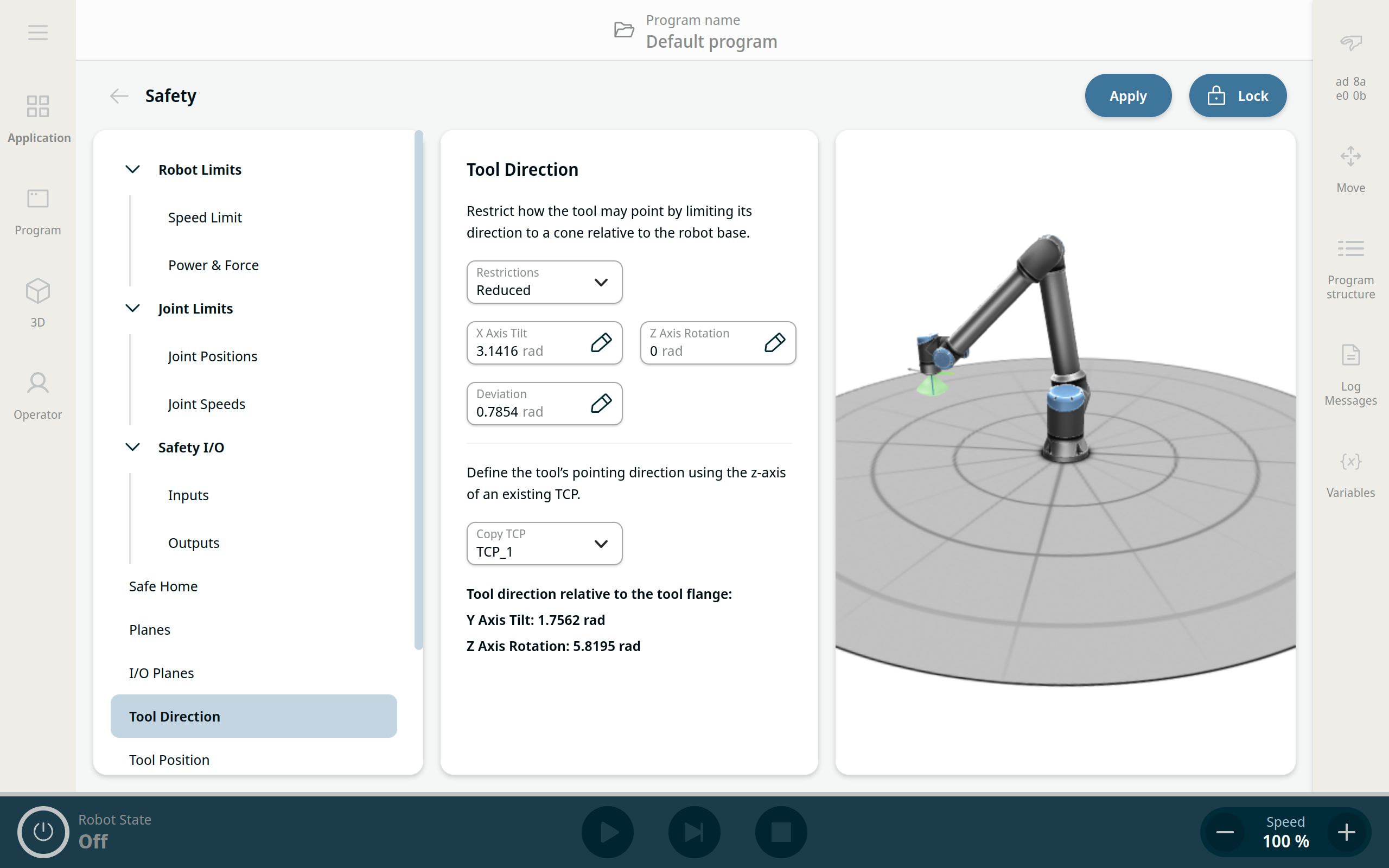
Alternativ können Sie die Z-Achse eines vorhandenen TCP kopieren, indem Sie diesen TCP aus dem Dropdown-Menü auswählen.
|
|
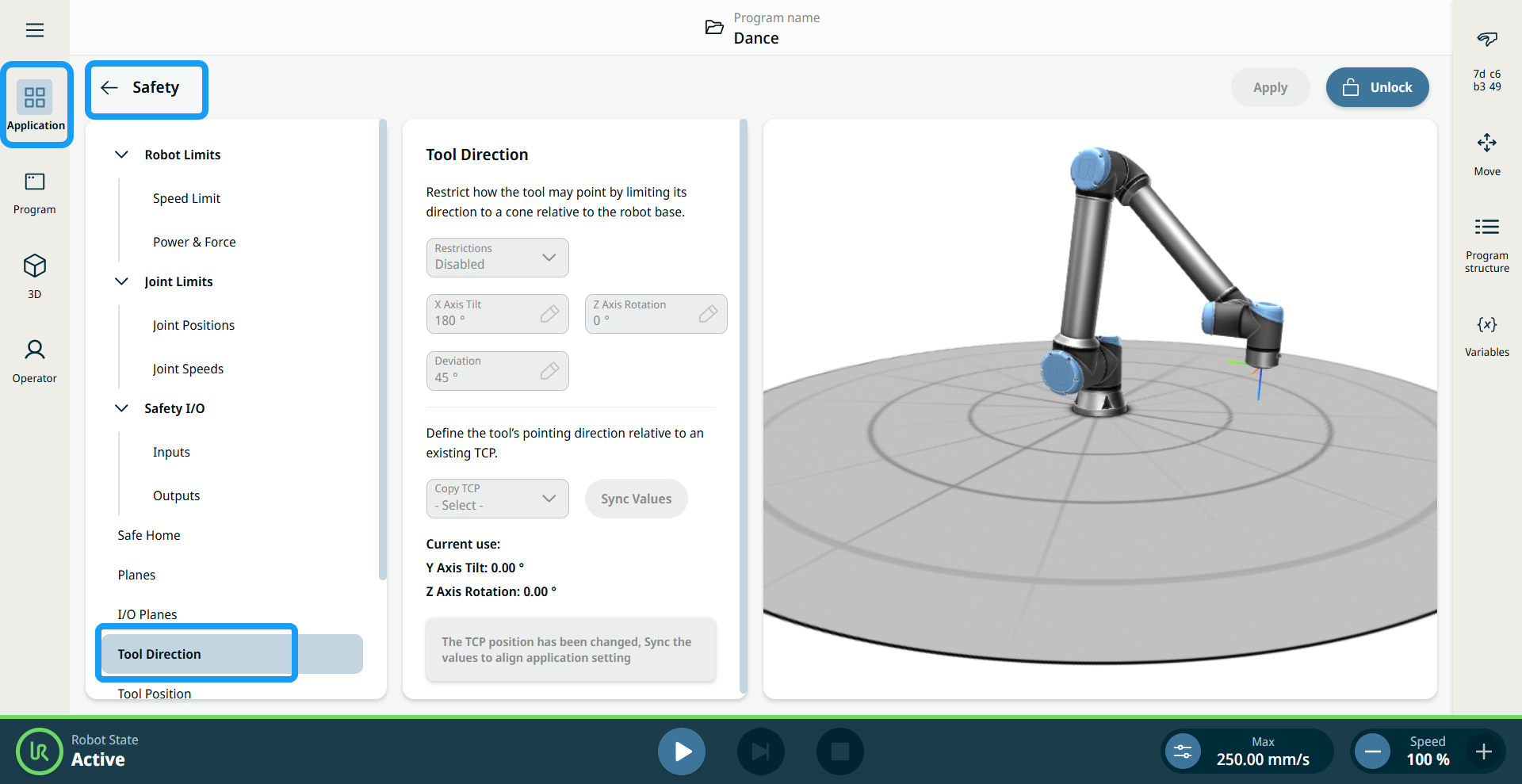
So rufen Sie „Richtung Tool“ auf |
|