PROFIsafe
| Beschreibung |
Das Netzwerkprotokoll PROFIsafe (implementiert als Version 2.6.1) ermöglicht es dem Roboter, mit einer Sicherheits-SPS gemäß den Anforderungen von ISO 13849, Kategorie 3, PLd, zu kommunizieren. Der Roboter überträgt sicherheitsrelevante Informationen an eine Sicherheits-SPS und empfängt sicherheitsrelevante Informationen. Die sicherheitsrelevanten Meldungen können Statusmeldungen sein oder eine Sicherheitsfunktion auslösen (z. B. reduzierte Einstellungen, Stopp). Stopp-Befehle werden gemäß IEC 60204-1 beschrieben, wobei der Not-Halt-Befehl ein Stopp der Kategorie 1 und der Sicherheitsstopp ein Stopp der Kategorie 2 ist.
Die PROFIsafe-Schnittstelle bietet eine sichere, netzwerkbasierte Alternative zum Anschluss von Kabeln an die Sicherheits-E/A-Pins der Robotersteuerbox. Durch die Verwendung der PROFIsafe-Schnittstelle werden die funktionalen Sicherheitsspezifikationen des UR-Roboters (PL, Kategorie und PFH) beibehalten. Weitere Informationen finden Sie im Abschnitt „Tabelle der Sicherheitsfunktionen“ im UR-Handbuch. Beispielsweise entspricht der „Sicherheitsstopp“ der PLd-Kategorie 3 mit einem PFH-Wert von weniger als 1,8E-07 (1,8 × 10⁻⁷).
PROFIsafe ist nur für Roboter verfügbar, die über eine Aktivierungslizenz verfügen, die Sie erhalten können, indem Sie sich an Ihren lokalen Vertriebsmitarbeiter wenden. Nachdem Sie die Lizenz erworben haben, laden Sie sie bei myUR herunter. Please refer to "Robot Registration and URCap License files" for information regarding robot registration and license activation.
|
| Sicherheits-SPS-Eingang |
Eine Statusnachricht, welche der Roboter an die Sicherheits-SPS sendet, enthält die Informationen, welche auf der folgenden Tabelle gezeigt werden.
|
||||||||||||||||
|
|
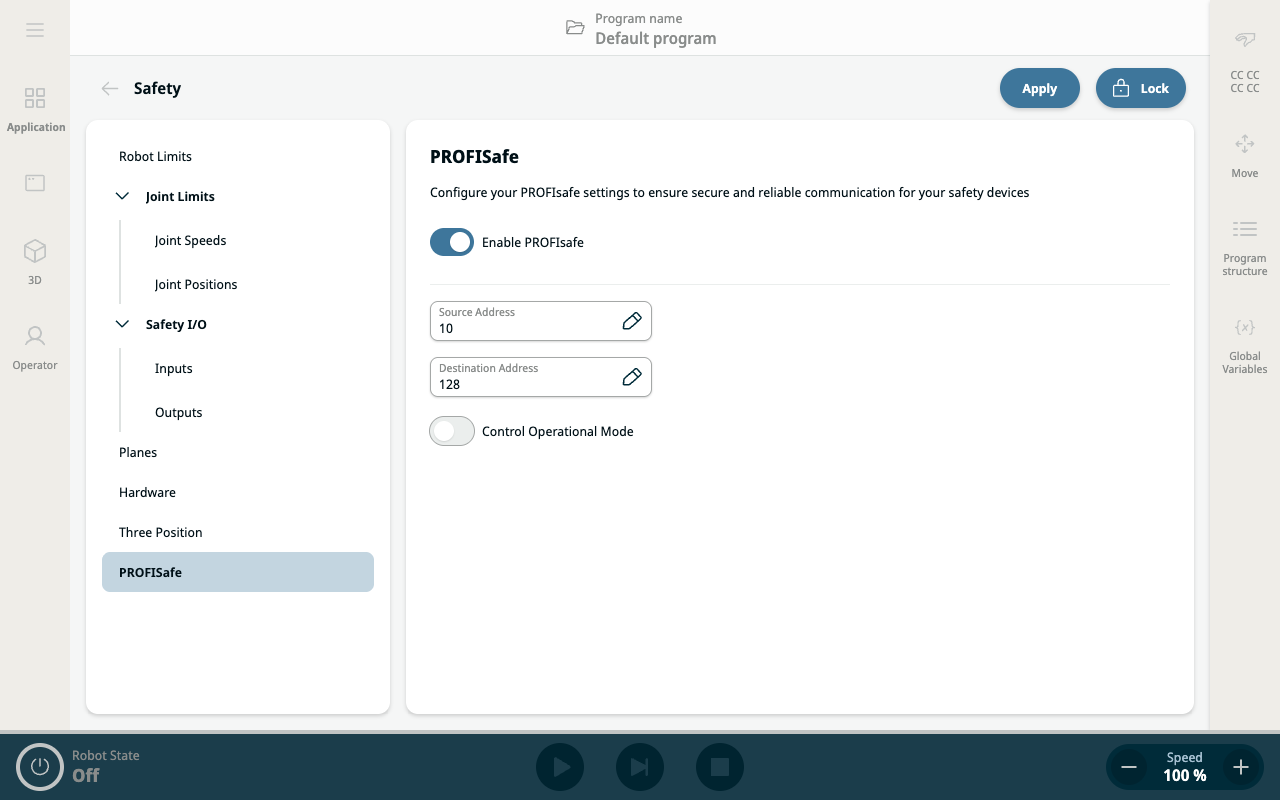
| PROFIsafe konfigurieren |
|
|
|
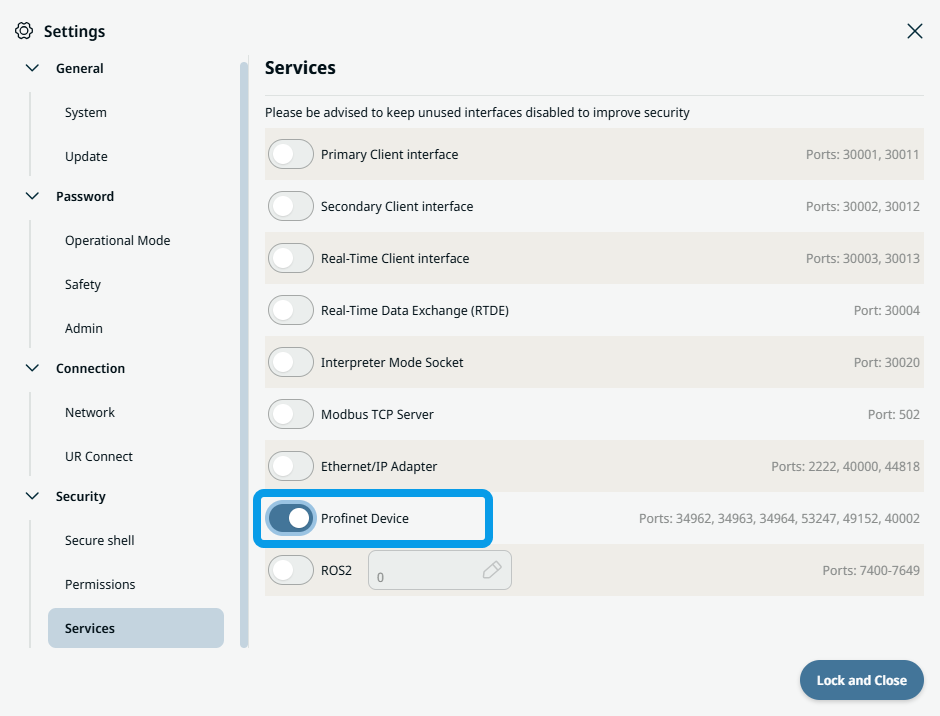
Um PROFIsafe zu konfigurieren und zu nutzen, muss Profinet-Gerät im Sicherheitsdienste-Einstellungsmenü aktiviert sein.
 Read for details and interface location "Profinet".
|