Sicherheitsfläche unter Verwendung eines Koordinatensystems
| Beschreibung |
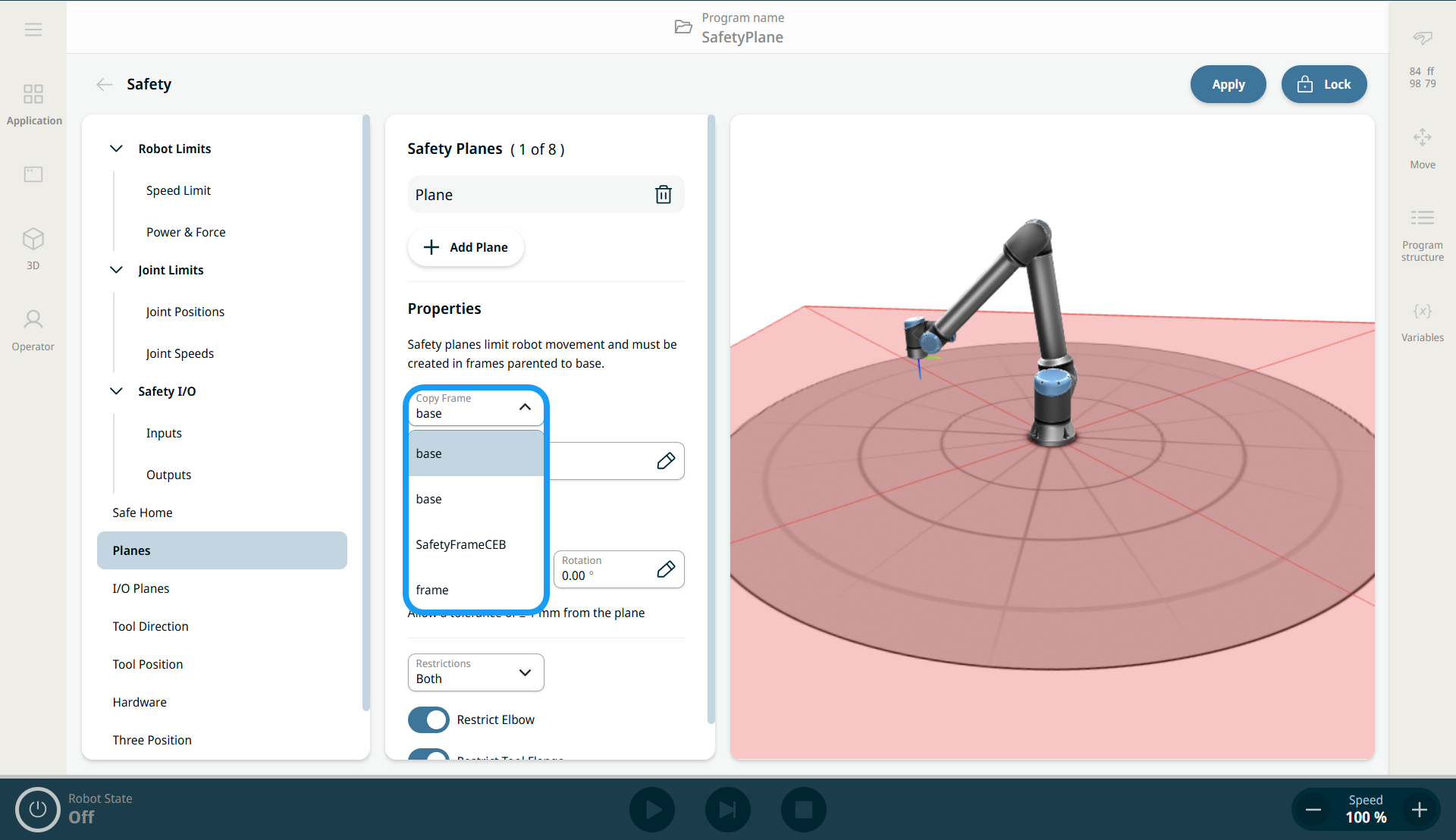
Sie können ein bestehendes Koordinatensystem verwenden, um eine Sicherheitsebene zu definieren. Dies bietet eine intuitivere Möglichkeit, Ebenenparameter anhand einer vordefinierten Position und Drehung (X, Y, Z, RX, RY, RZ) festzulegen. Wählen Sie das Koordinatensystem im Dropdown-Menü Koordinatensystem kopieren aus.
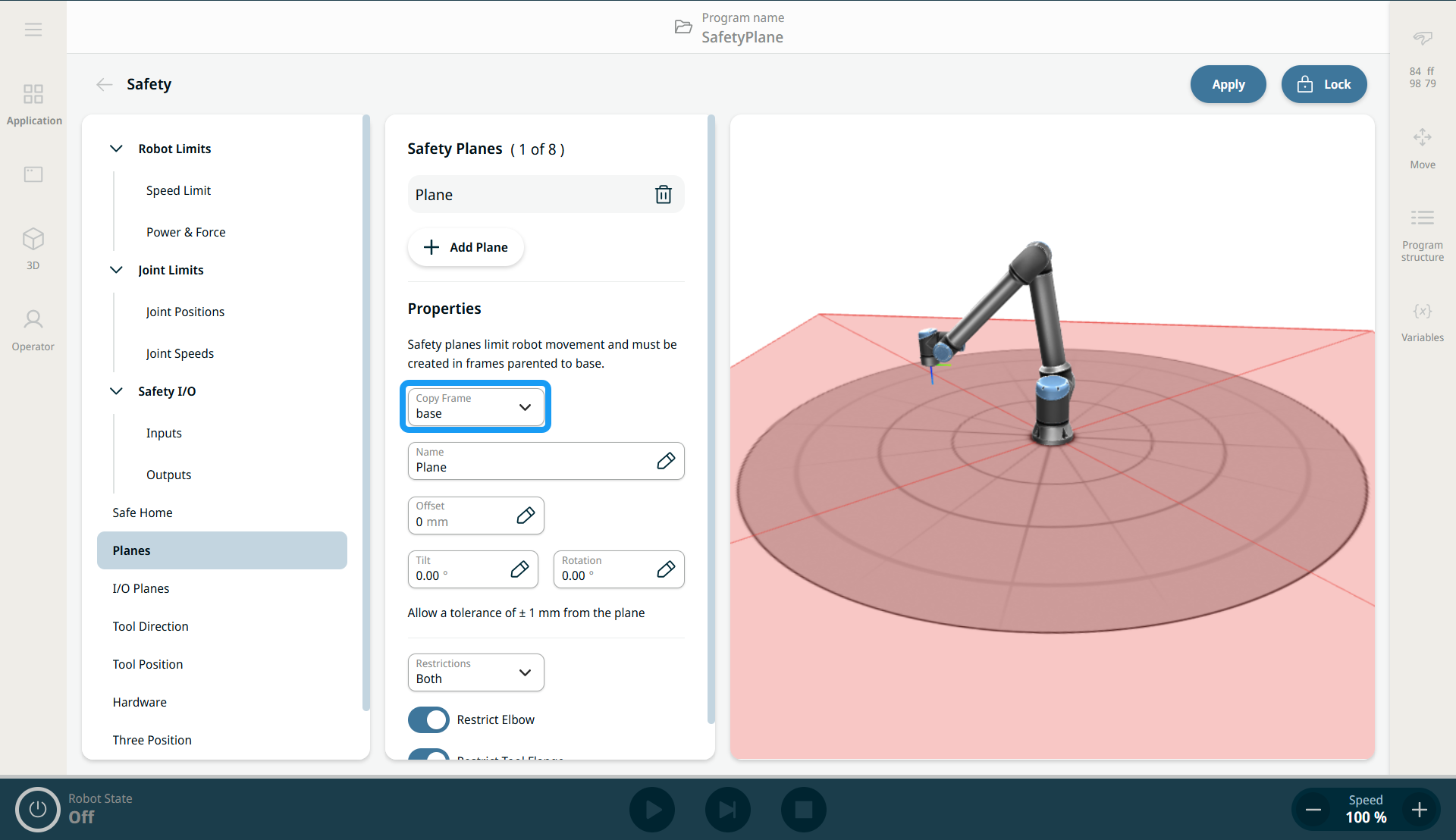
Das Dropdown-Menü „Koordinatensystem kopieren“ befindet sich in den Parametern einer Sicherheitsebenen-Definition auf dem Bildschirm „Ebenen“. Diese Liste enthält Koordinatensysteme, die auf dem Bildschirm " Koordinatensysteme" definiert wurden. Wenn Sie ein Koordinatensystem auswählen, wird es als Definition der Sicherheitsebene verwendet. Wenn Sie Offset-, Neigungs- und Drehparameter angeben, werden diese auf das ausgewählte Koordinatensystem angewendet (siehe „Konfigurieren einer Sicherheitsebene“). Die resultierende Sicherheitsebene vereint alle Parameter.
|
|
|
Siehe den Abschnitt „Koordinatensysteme“ im Software-Handbuch. |
|
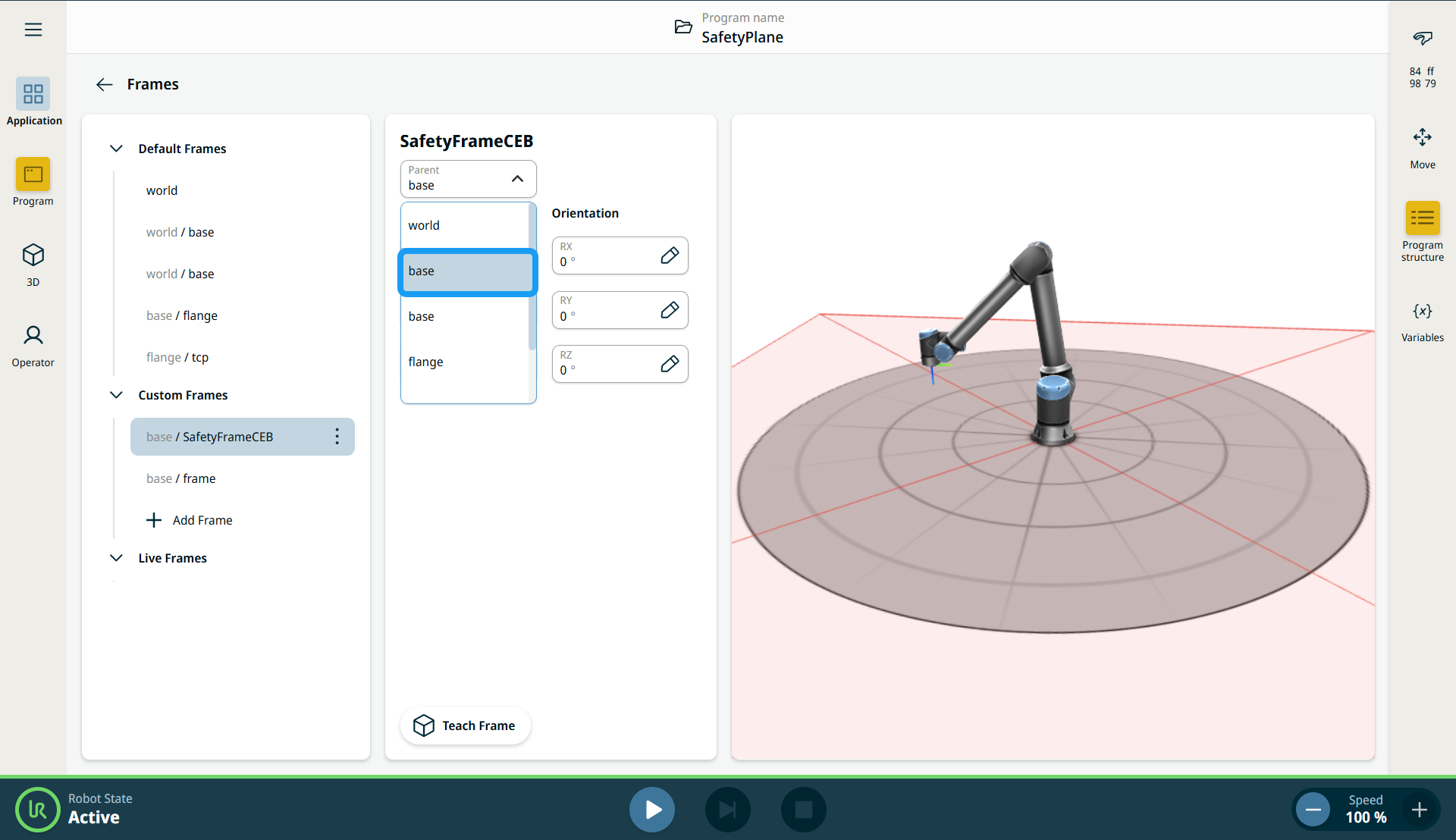
Koordinatensystem erstellen |
|
|
|
Koordinatensystem in der Sicherheitsebene auswählen |
|
|
|
|
|
|
Ein Koordinatensystem, das für eine Sicherheitsebene verwendet wird, kann anders herum sein, als Sie erwarten. Befindet sich der Roboter auf der Seite der Ebene, auf der der Verstoß liegt, addieren Sie eine Neigung von 180 Grad hinzu. Informationen zu Einschränkungen bei der Ebenenkonfiguration, beim Ellbogen und beim Werkzeugflansch finden Sie unter „Sicherheitsebenen“.
|