Použití funkce Přesunutí robota na pozici
Když dokončíte program, funkce Přesunutí robota na pozici umožňuje ramenu robota přejít do této výchozí pozice. Před spuštěním programu musí být rameno robota ve výchozí poloze.
Další informace naleznete v kapitole Přesunutí robota na pozici v Uživatelské příručce robota.
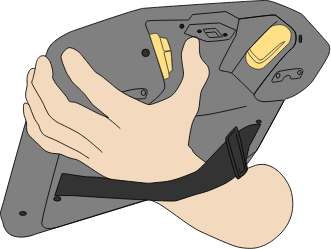
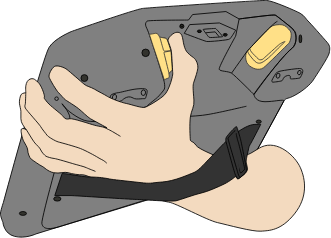
Pokud chcete pomocí tlačítka 3PE přesunout robota na pozici:
-
Po dokončení programu stiskněte Přehrát
-
Vyberte Přehrát od začátku.
Na PolyScope se objeví obrazovka Přesunout robota na pozici a zobrazuje se pohyb ramene robota.
-
Light-press and hold the 3PE button.
-
Now, on PolyScope, press and hold Automove, for the robot arm to move to the start position.
Objeví se obrazovka Přehrát program.
-
Lehce stiskněte tlačítko na 3PE, což spustí váš program.
-
Pusťte tlačítko na 3PE, čímž zastavíte program.