jerk_gain_scaling_set()
The following motion profiles have a jerk limited acceleration and deceleration phase:
-
movej[motionversion=>2] and optimovej
-
movel[motionversion=>2] and optimovel
The jerk is the change rate of acceleration.
The default jerk depends on the specific pose, payload and acceleration and fits general applications.
It is possible to reduce the jerk for applications, which requires smoother motions.
This can be done with jerk_gain_scaling_set(gain=1.0).
Where:
0.01 <= gain <= 1.0,
and default gain is 1.0.
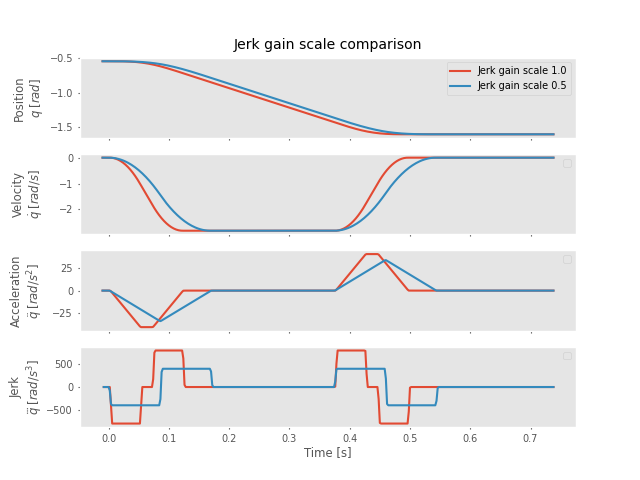
In this example, the jerk is reduced with a gain of 0.5:
jerk_gain_scaling_set(0.5)
The value is stored until this function is called again or until reboot. Add this to the beginning of your program to ensure it is called before the first move (otherwise default value will be used).
See also: