Waypoints
| Description |
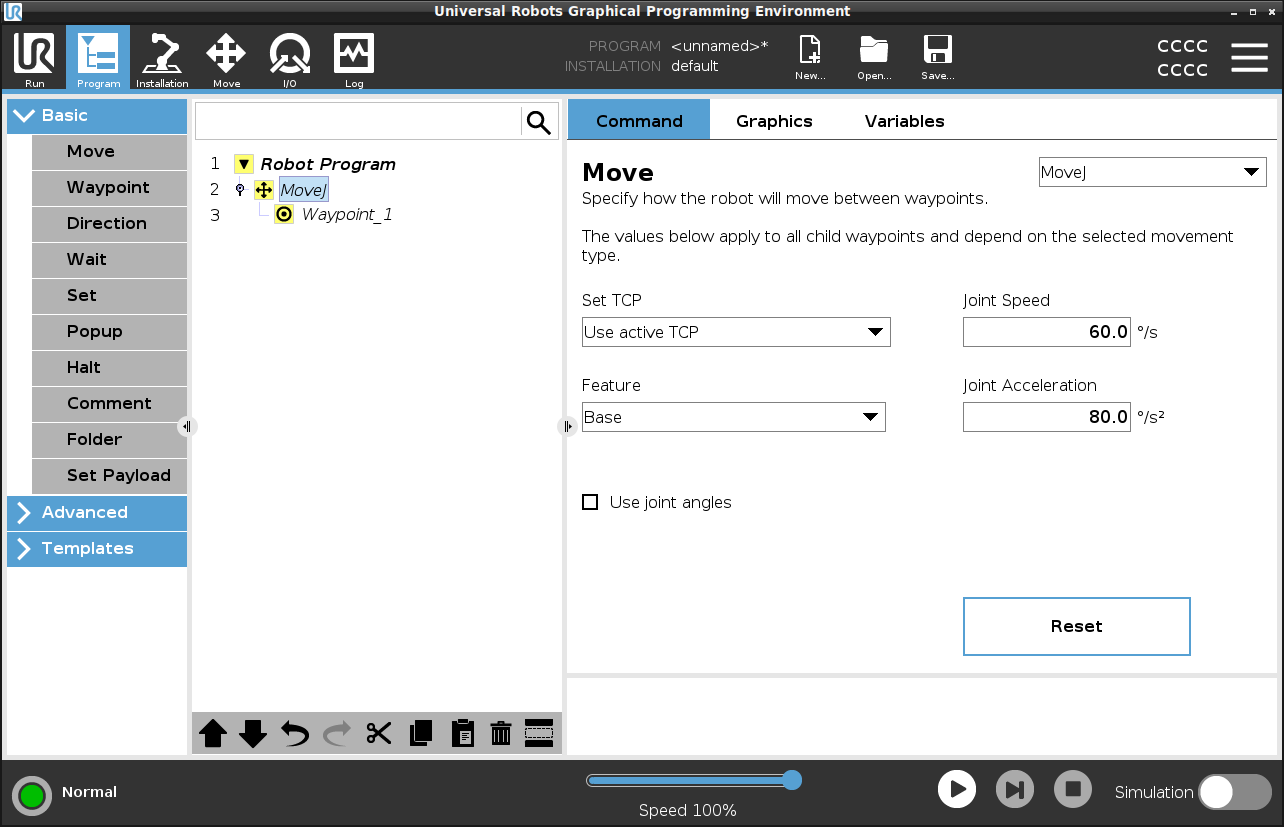
Waypoints are one of the most central parts of a robot program, telling the robot arm where to go one movement at a time.
See the following sections about using a waypoint:
|
| Add Waypoints
|
A waypoint accompanies a Move, so adding a Move is required for the first waypoint. |
| Add a waypoint to a robot program |
|
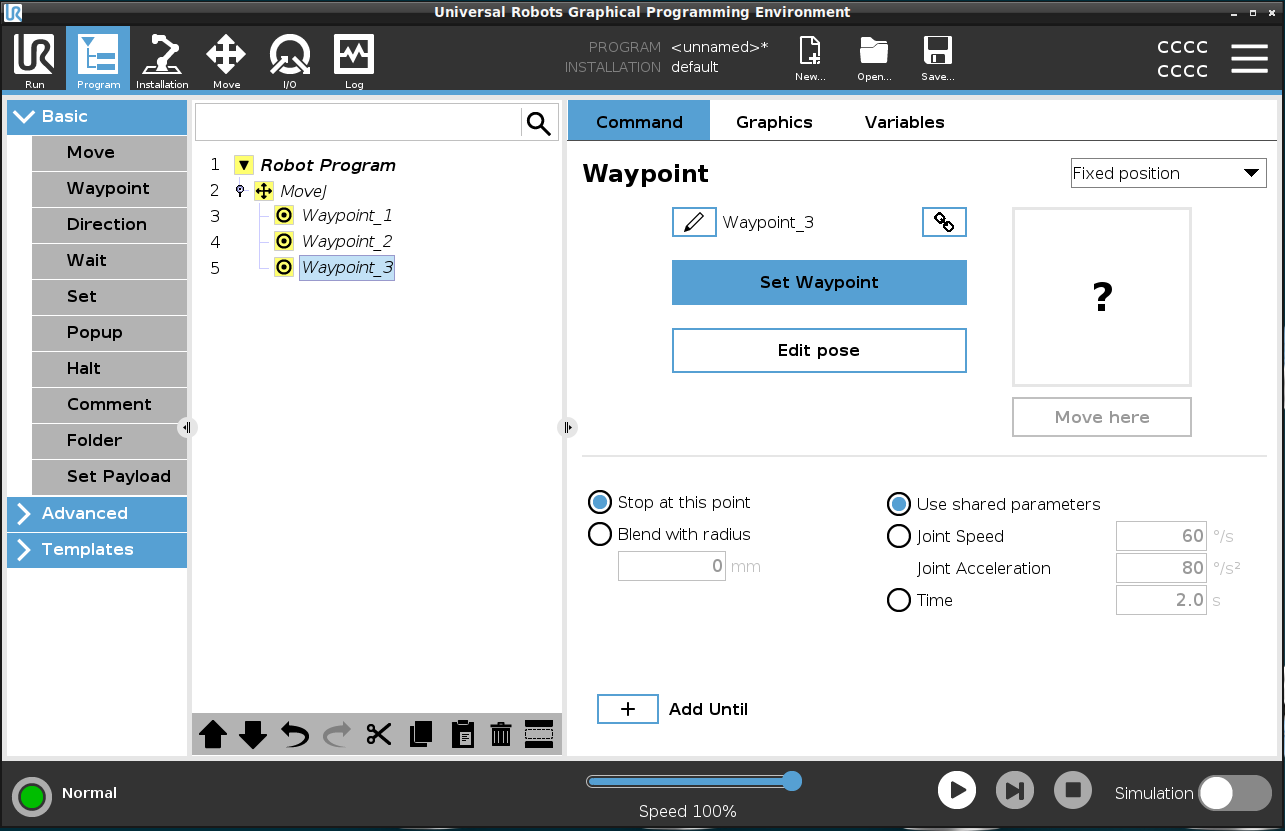
| Add additional waypoints to a Move or Waypoint |
The additional waypoint is added under the waypoint that you selected in the robot program.
|
| Detail |
Using a waypoint means applying the taught relationship between the feature and the TCP from the Move command. The relationship between the feature and the TCP, applied to the current selected feature, achieves the desired TCP location. The robot calculates how to position the arm to allow the current active TCP to reach the desired TCP position.
|