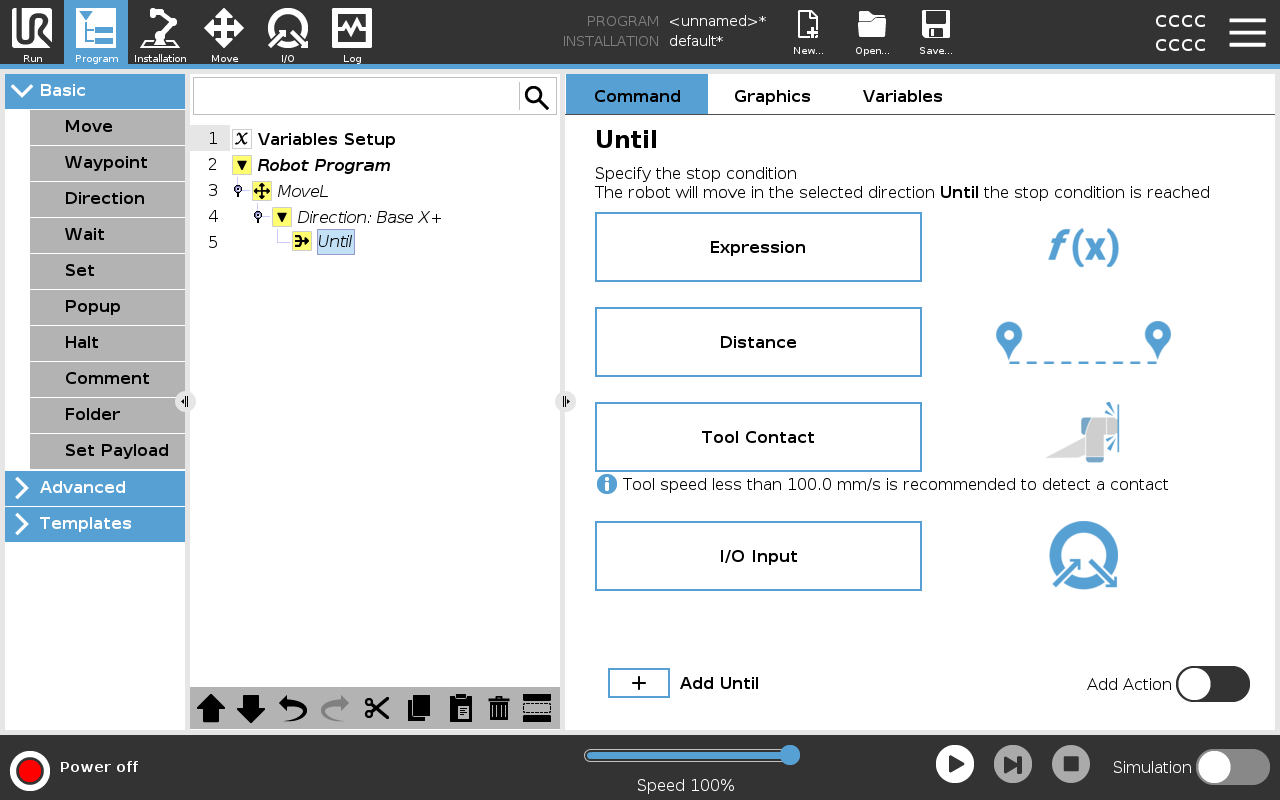
Add Until
| Description |
The program node Until defines stop criteria for a motion. You can add Until nodes from Direction and Waypoint commands. You can only add a direction node to a MoveL and MoveP. The robot moves along a path and stops when contact is detected.
You can add multiple stop criteria to a single movement. The motion stops when the first Until condition is met. You can add multiple Add Until one after the other, because there can be multiple conditions that must be met, before an action is done or executed.
|
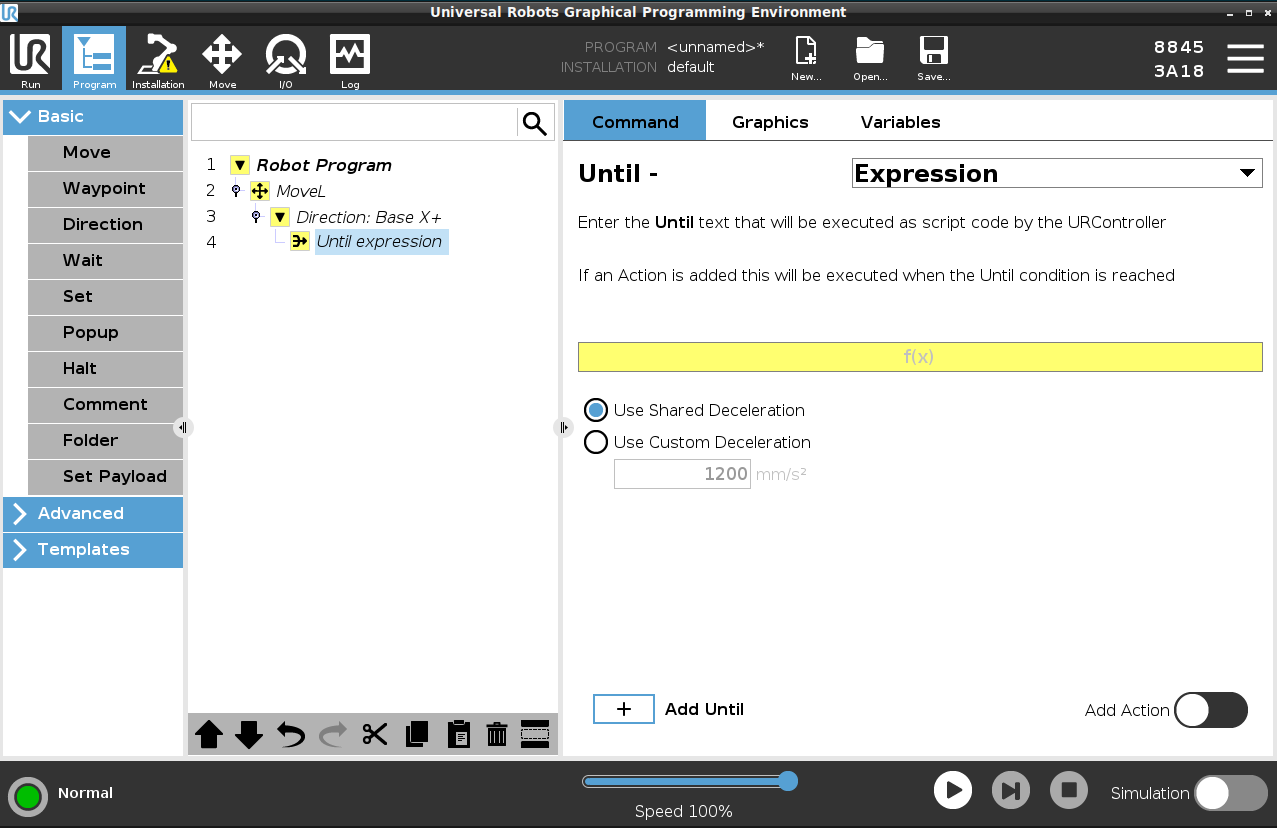

| Add Action |
This node allows you to add a program node if a specific Until condition is met. You can also add an additional action to be executed right after an Until command. |
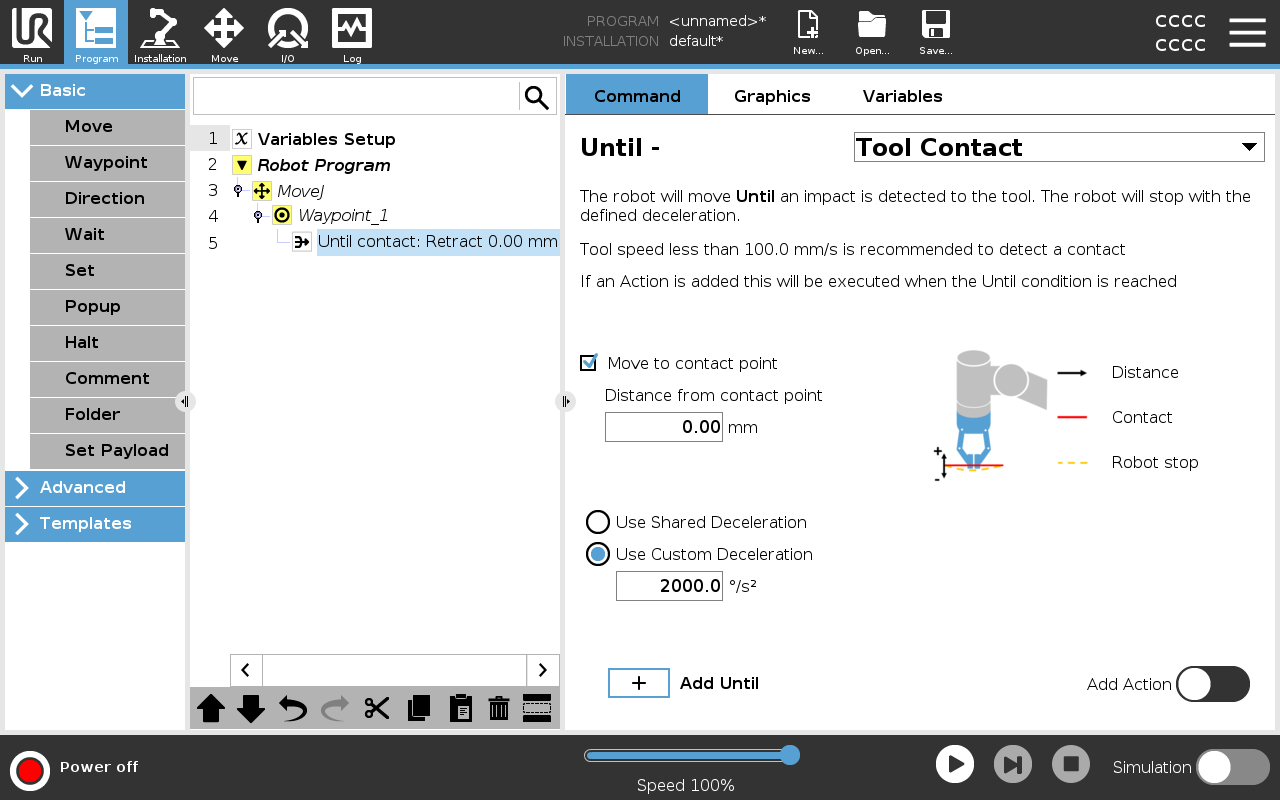
| Example |
Until Tool Contact can engage the gripping action of a gripper tool. If no Action is defined, then program execution continues to the next program node in the Program Tree.
|
| Add a No Action after an Until command |
|