Direction
| Description |
The Direction command specifies a motion relative to feature axes or TCPs. The robot moves in the path specified by the Direction program node until that movement is stopped by an Add Until condition.
|
| Direction |
The Direction command allows you to make the robot move in a specific direction. |
| Example |
Direction vectors of [100,0,0] and [1,0,0] have the same effect on the robot; use the Speed Slider to moving along the x-axis at a desired speed. The values of the numbers in the direction vector only matter relative to each other. |
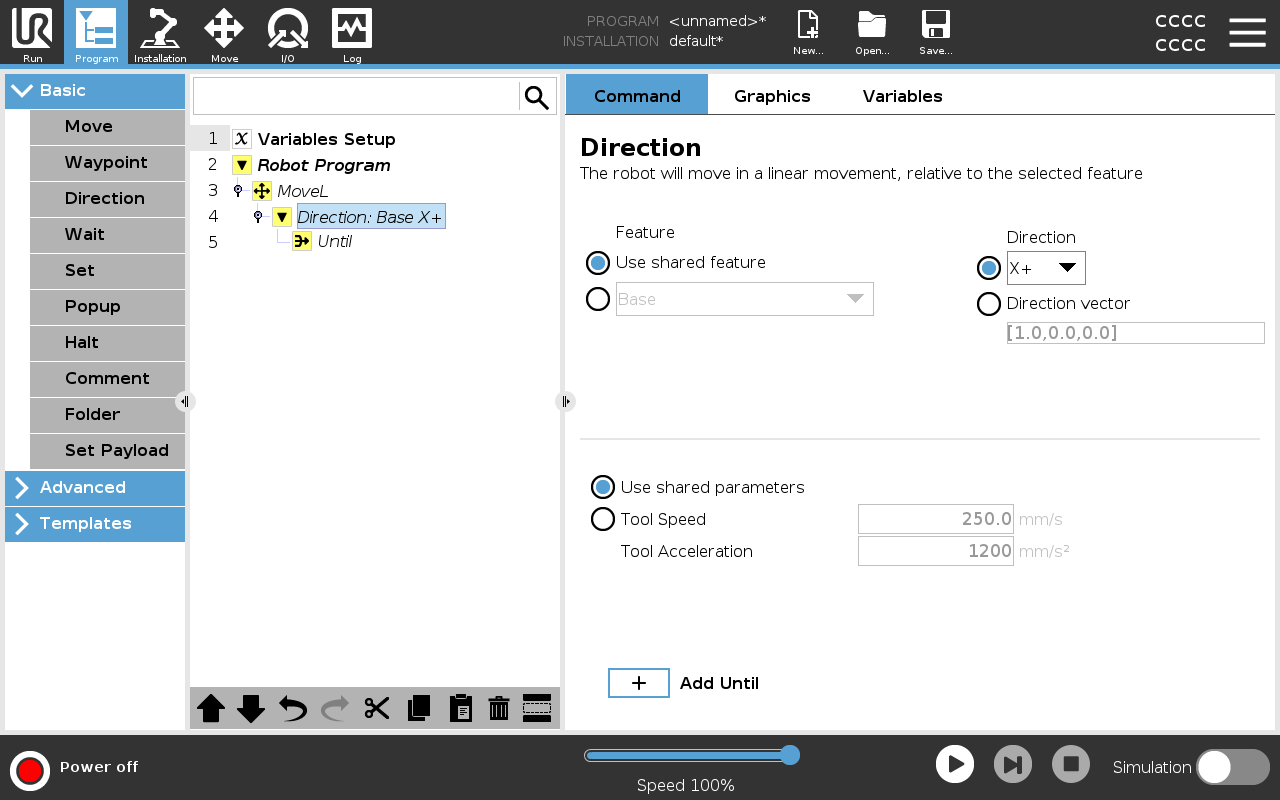
| Add a Direction movement to a robot program |
|
|
Select the feature and direction |
Difference between Shared Feature or BASE/TOOL
Difference between Direction and writing the Direction Vector
The Direction Vectors define a custom code expression that is resolved to a unit vector.
|