Fixed Waypoint
| Description |
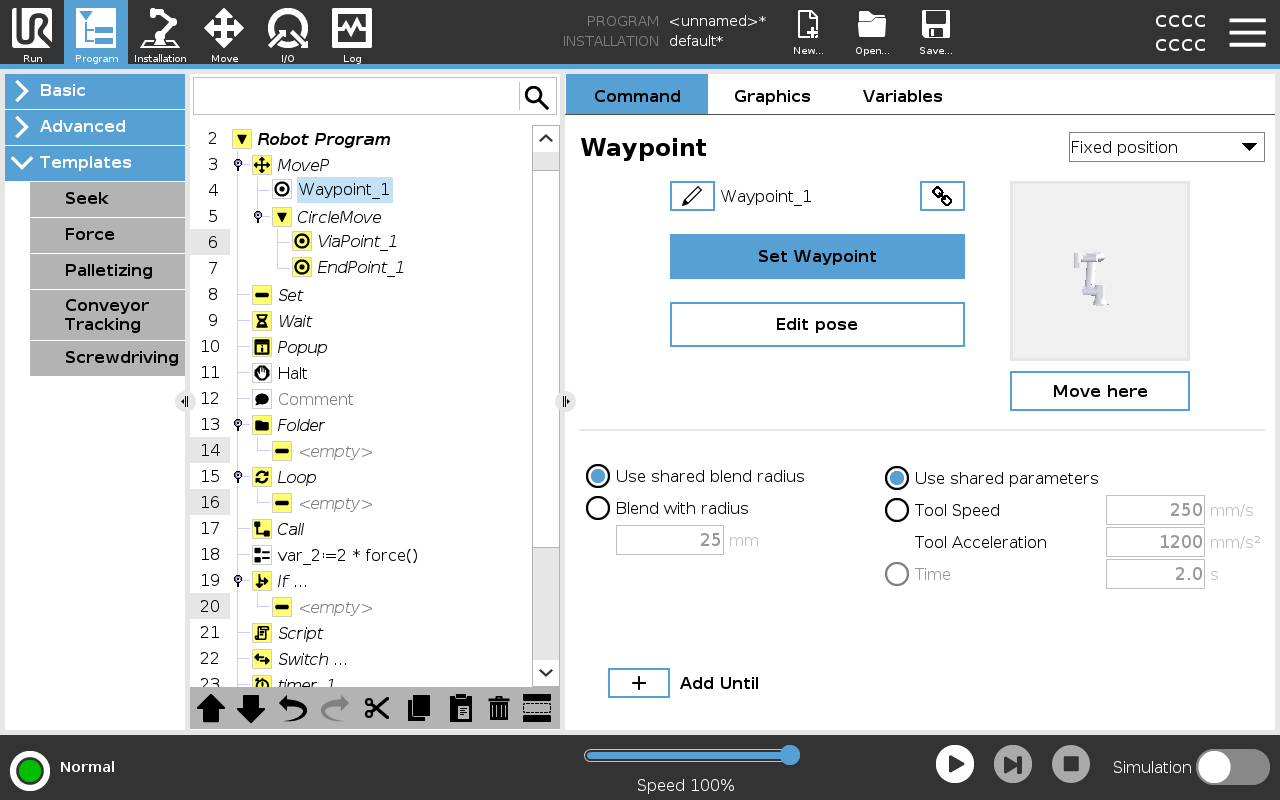
A fixed waypoint is the standard waypoint used in PolyScope. It is a fixed location, relative to a set coordinate system (the robot’s base by default), that the robot will move back to when prompted. A fixed position waypoint is taught by physically moving the robot arm to the position. You can move the robot with the Freedrive or with the Move Tab in PolyScope.
When to use:
When NOT to use:
|
| Fixed Waypoint |
You can add a fixed waypoint to your robot program, when you add a Move command. There is no difference, if the Move command is a MoveJ, a MoveL or a MoveP. |
|
|
To add a fixed waypoint to a robot program
|
| Example |
When you are removing a work piece from a chuck in a machine tending application, make the waypoint a fixed position to avoid any contact with equipment.1
|