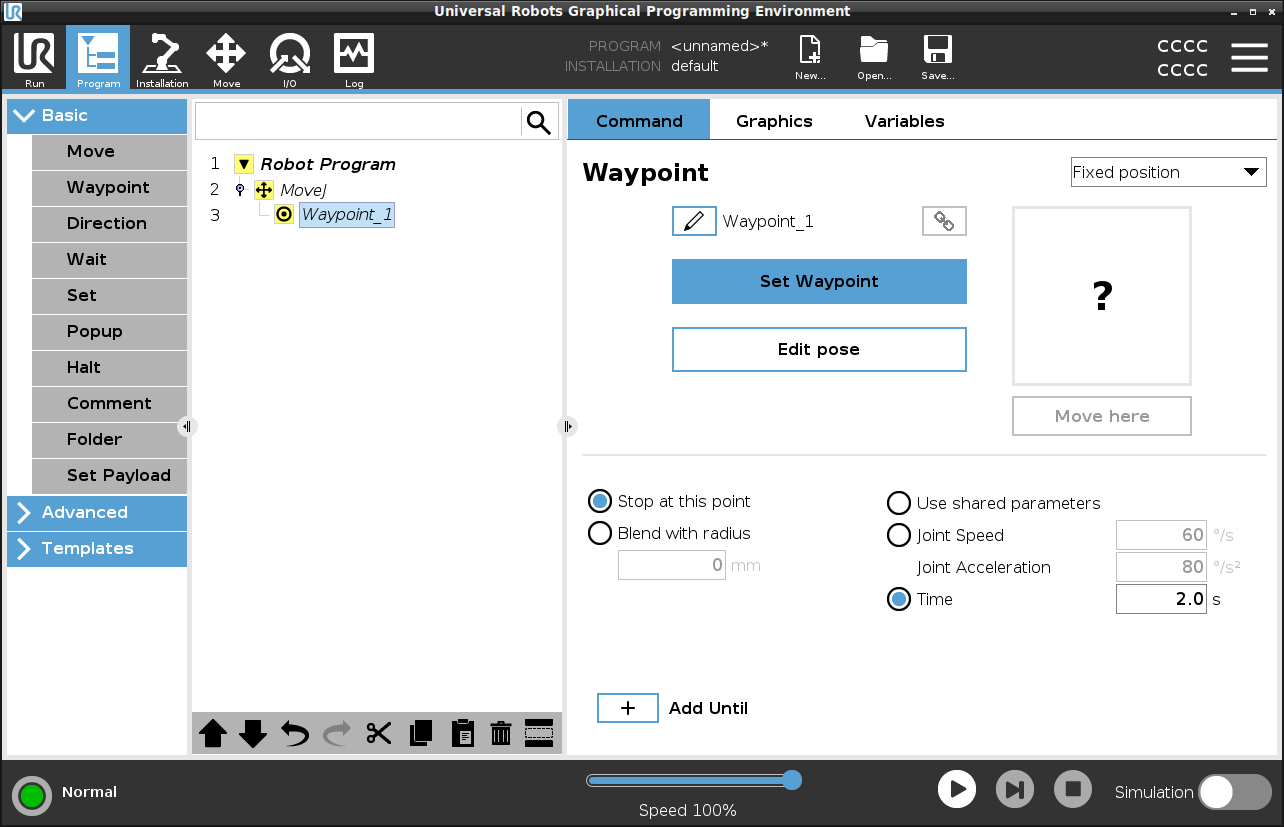
Configuring Waypoints
| Description |
Waypoints can be configured in different ways depending on the setup, application and position of the waypoint in the robot program.
|
| Blend with radius |
You can add a blend radius for blending the robot arm's movement between waypoints. See this link for an in-depth description of blending.
|
| Use Blend with radius |
When you add a blend to a waypoint, the transition between waypoints becomes more fluid and efficient. This will make the robot arm move more smoothly, but it is not applicable in every robot arm movement.
|
| Tip |
If you are using multiple waypoints to guide the transition between two points you can blend the waypoints in between to make the overall movement smoother and more efficient.
|
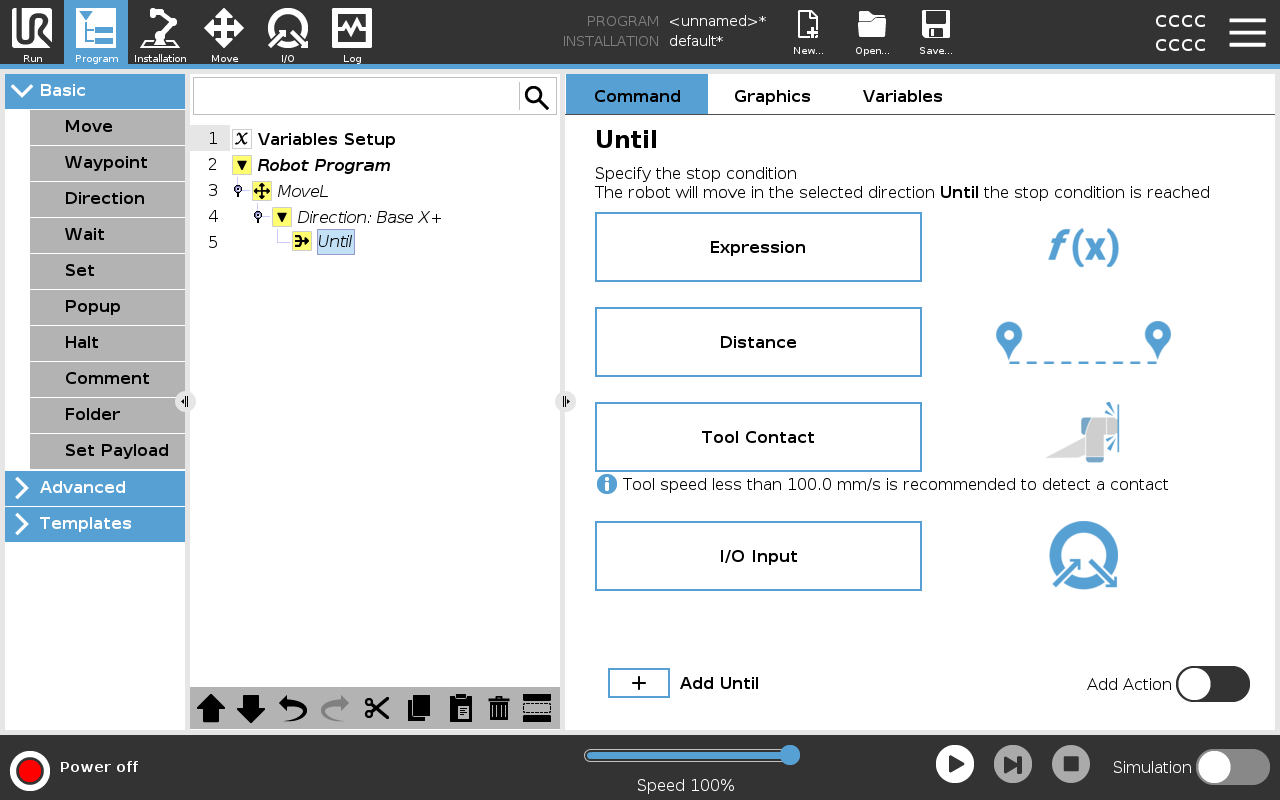
| Add Until |
Add Until will give you a number of different options for configuring your waypoint.
|
|
Steps |
Please see the link Add Until for step by step instructions.
|