Wrist Clamping Torque Limit
| Description |
Wrist Clamping Torque Limit is a setting that enables or disables limitation of the maximum clamping torque for the wrist joints of the robot. The limitation is enabled by default. This safety function limits how much torque the wrist can apply when pushing.
|
|
Wrist Clamping Torque Limit details |
When enabled, the robot limits torque in the wrist joints to prevent clamping between the wrist, payload, and the lower arm of the robot. When the setting is enabled, it also defines a non-safety-rated upper limit for the applied torque windows of the base, shoulder, and elbow joints. In force control applications, the achievable contact forces may be significantly lower than the specified forces in the Tool Force Limit and Elbow Force Limit safety functions.
When disabled, the robot can use higher pushing force with the wrist joints, for example in force-controlled applications. When the function is disabled, risks of clamping between the wrist, payload, and lower arm of the robot must be mitigated by other means. This safety function is enabled on all robots by default. In PolyScope X version 10.12 and newer, it is possible to disable this safety function.
|
|
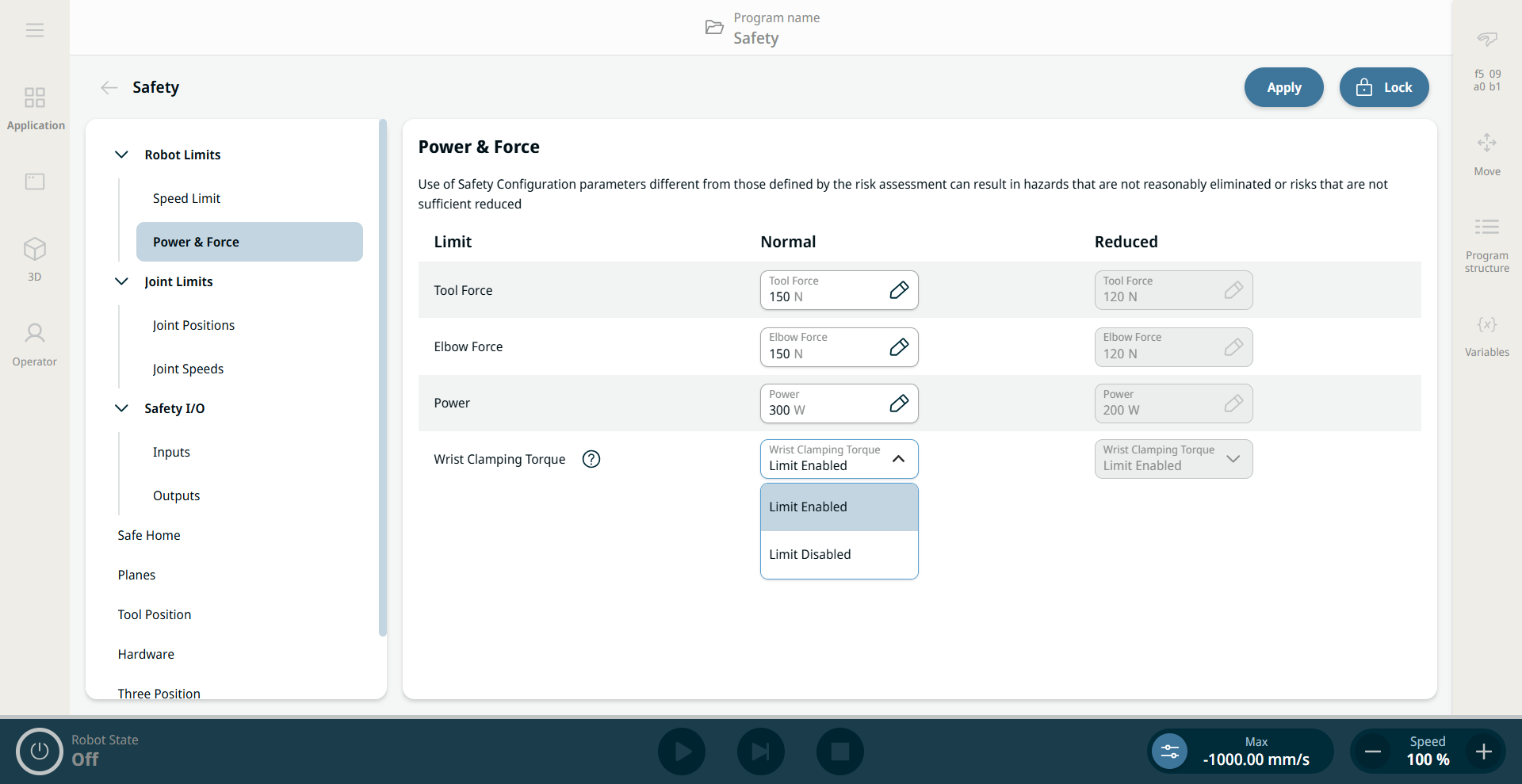
Enable and disable Wrist Clamping Torque Limit |
|