Joint Limits
| Description |
Joint limits allow you to restrict individual robot joint movements in joint space by joint rotational position and joint rotational speed. Joint limiting can also be called software-based axis limiting. These are the robot joints:
About the Normal and Reduced safety modes, read Robot Limits.
|
| Joint Limits options |
There are two Joint Limits options: Maximum speed and Position range. Maximum speed: defines the maximum angular velocity for each joint. Position range: defines the position range for each joint. Again, the input fields for Reduced mode are disabled if there is no safety plane or configurable input set to trigger it. This limit enables safety-rated soft axis limiting of the robot. |
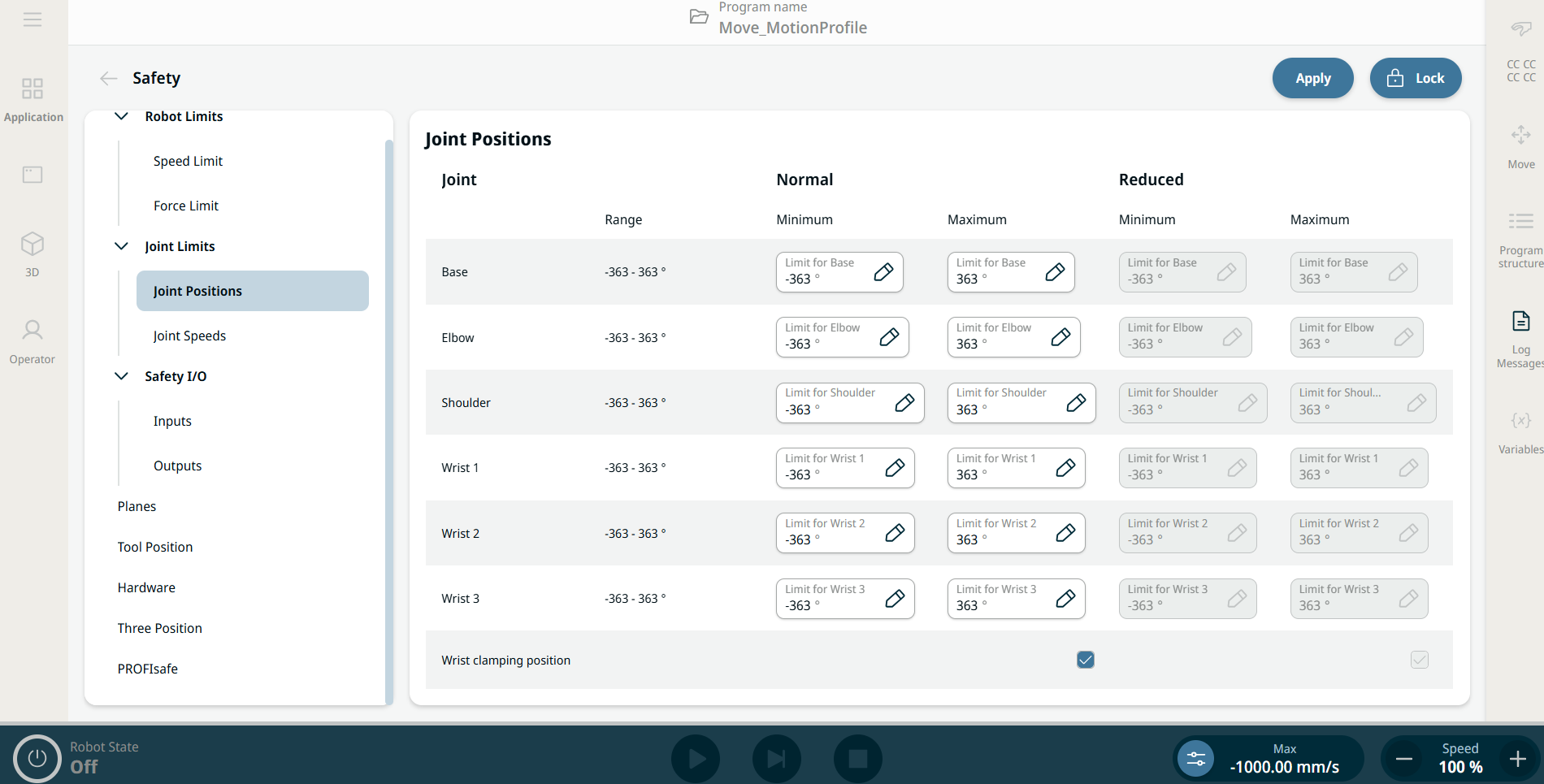
| Joint Positions |
Sets upper and lower limits for the allowed joint positions relative to the base of the robot.
|
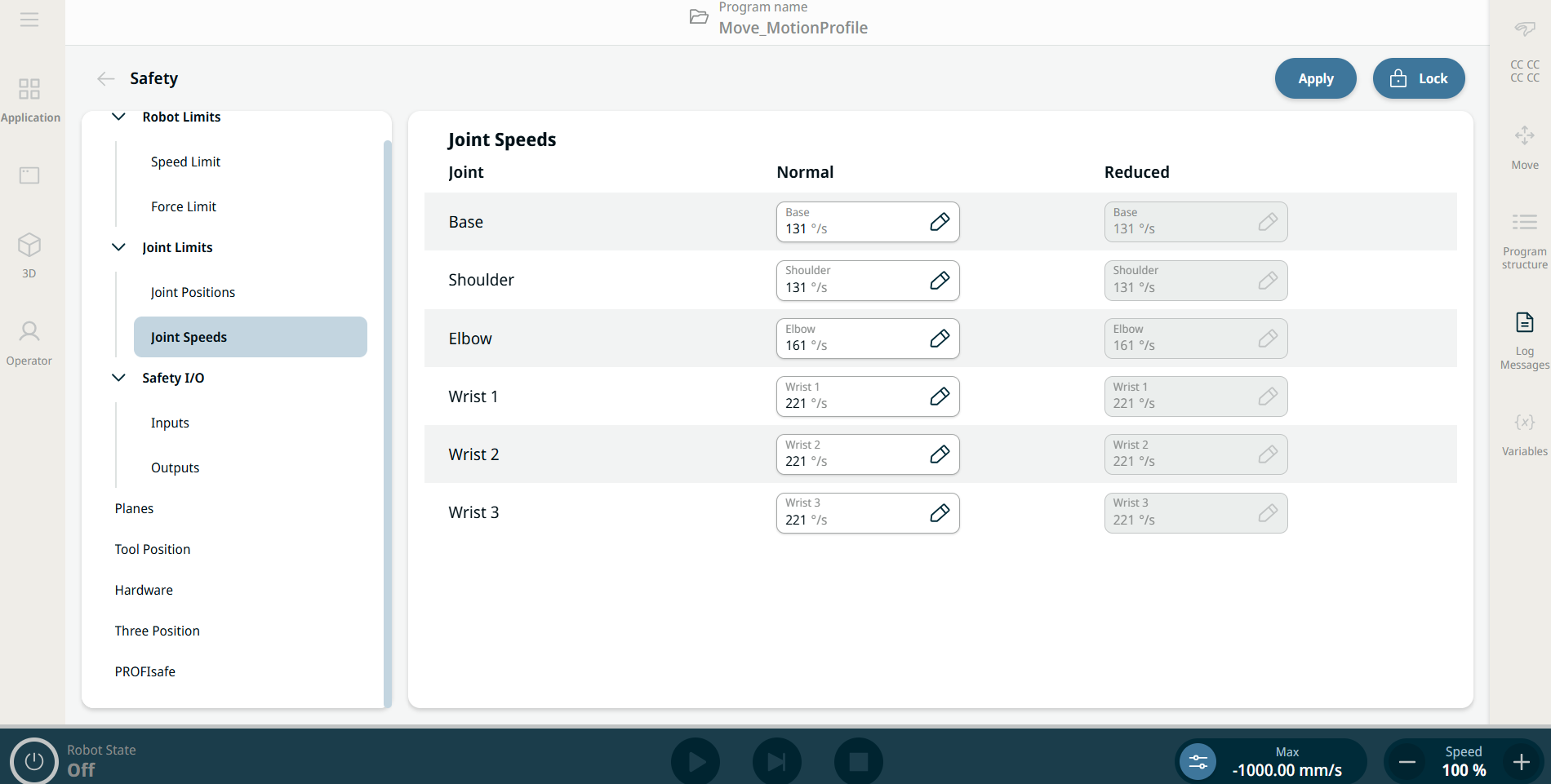
| Joint Speeds |
Sets an upper limit for joint speed relative to the base of the robot.
|