
PolyScope 5
我們最先進的軟體介面,連接所有 UR 協作機器人
功能

遠端TCP和工具路徑
您可以下載並安裝的軟體外掛程式。
UR Caps
為元件與應用增加進階功能。

力控模式
透過力矩感測器,可編程控制機器人以指定的力度移動。

內建精靈工具
可自動估算重量、重心位置與工具中心點(TCP)。
節點式編程
透過樹狀階層視覺化程式流程。使用者可從選單中選取節點,依照操作順序排列建構程式。每個節點代表一個機器人指令,並可設定其參數。例如,「Move」節點可指示機器人移動至指定位置,而「Set」節點則可切換機器或裝置的訊號。透過剪下、複製與貼上功能,能輕鬆建立與編輯程式,加速系統部署與重啟。

自由拖曳(Freedrive)
透過手動移動機器手臂,快速完成定位。PolyScope 的「自由拖曳」功能只需輕按按鈕,即可輕鬆引導機器人至理想位置。若應用情境無法靠近機器人,也可透過教導器上的彩色箭頭遠端操作移動機器人。最後,您也可直接在軟體中輸入數值,進行精細調整與設定。

安全功能
透過專屬的安全工具箱設定各項安全參數。協作機器人雖具協作特性,仍屬於工業機械。e-Series 所搭載的 PolyScope 軟體內建 17 項經認證的安全功能,有助於降低風險,實現安全自動化作業。您可在專屬的安全選單中進行各項設定,包括建立安全平面、限制關節活動範圍等操作。

UR Script
UR Script 是一種以 Python 為基礎的腳本語言,可用來撰寫進階功能。
支援 Modbus、PROFIsafe 與 Ethernet/IP 等業界常用通訊協議,並可透過 URScript API 解鎖 PolyScope 的高度彈性。雖然大多數應用可完全透過節點式編程完成,但進階功能可支援更複雜的設定。同時也支援透過低電壓接點連接第三方感測器。例如,您可以使用 read_input_integer_register() 讀取 PLC 的暫存器,或透過 get_actual_joint_positions() 監控機器人關節位置。
以及更多功能
作為附加功能,OptiMove、協調運動(Coordinated Motion)與 PROFIsafe 可進一步強化 PolyScope 5 的功能,讓應用更加高效且精準。

動作更平順,效率更提升
OptiMove 提供直覺式的速度與加速度設定方式,讓調整更簡單、動作更流暢,並有效縮短循環時間。直覺化的運動編程簡化了設定與操作流程,重複精度的提升也確保每次執行都能穩定產出高品質成果。透過大幅減少振動,進一步提升精度與可靠性。使用 OptiMove 可避免不必要的保護性停機,最大化設備運轉時間與生產效能。立即下載 PolyScope 5.21 體驗全新功能。
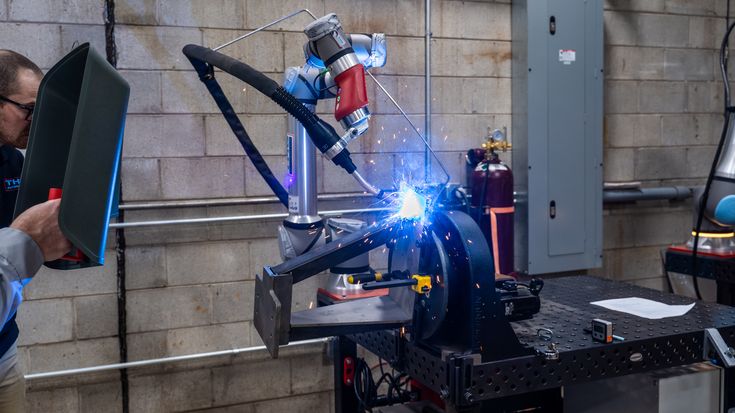
MotionPlus
透過 MotionPlus,讓您的焊接或棧板堆疊應用更上層樓。這套軟體功能組可實現協作機器人 TCP 與一個或多個外部馬達軸之間的同步運動。在與多軸外部設備協作時,MotionPlus 能帶來更平順的操作流程,協助用戶優化自動化循環時間,並精準追蹤工具路徑,進一步提升作業效率。

Vice President of Engineering at Emtek, Birk Sorensen我們能在不同生產批次間快速切換程式。這種協作方式讓我們每人每小時的日產量提升了一倍。

下載最新軟體
PolyScope 5.22 版本現已開放下載。我們建議您隨時更新至最新版本,以獲得錯誤修正、新功能,以及整體效能的提升。本次更新適用於 e-Series、UR20 與 UR30,包含以下新增功能:
- OptiMove
- MotionPlus 擴充功能
- 支援延長線纜
- 錯誤修正
有關完整功能和更新的清單,請參閱版本說明。版本資訊5.21.x.x
UR 資源專區



需要更多相關資訊嗎?
運用您的製程專業,搭配 PolyScope 的圖形化介面,打造穩健的自動化系統。沒有程式編寫經驗?沒問題。
- 丹麥商泰瑞達優傲科技股份有限公司台灣分公司
- 台元街 20號, 3樓
- - 新竹縣竹北市