圓弧移動
| 描述 |
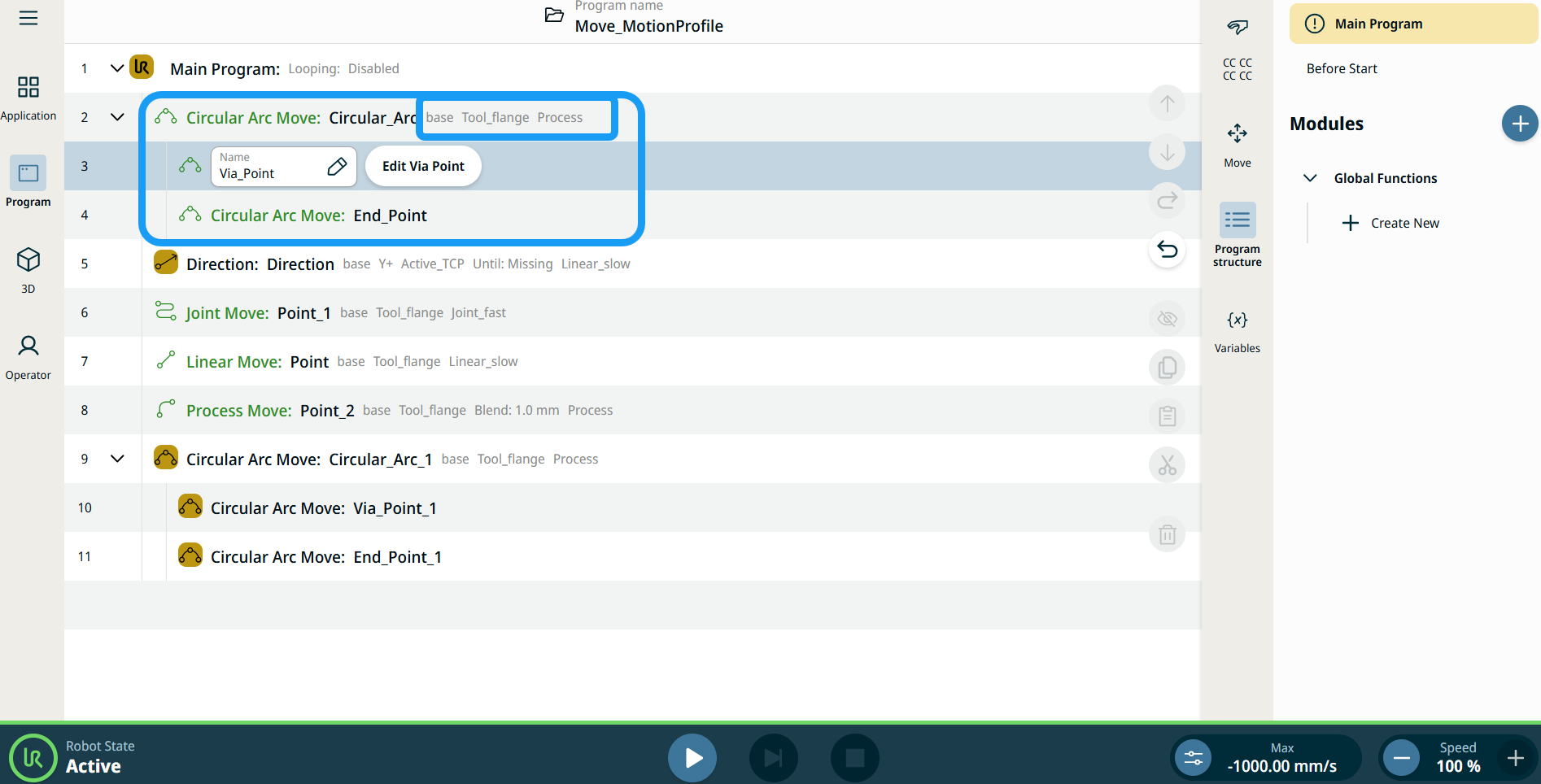
The Circular Arc Move enables you to program the robot to move in a circular motion while keeping the tool orientation either fixed or unconstrained.
|
|
To access Circular Arc Move command |
|
|
The three editable fields are:
|


| 移動節點上的運動設定檔標籤 |
程式樹中所有與移動相關的命令節點,都會顯示與每個節點相聯的運動設定檔。 此功能可讓使用者查看移動節點上已選取的運動設定檔。 此功能在下列命令節點實行: 具有自訂運動配置檔案的移動節點,將會顯示速度和加速度值,而不會顯示運動配置檔案。 |
|
|
|
| To access More settings |
Tap the More button, and the More settings screen appears. On the left side, you see four advanced options:
|

|
To use Orientation |
|

|
To use Movement |
|
 Two fields appear:
Two fields appear:|
To use Reference |
|

|
To use Transform |
|
|
To use Circular Arc Move: Via_point |
|

|
To use Circular Arc Move: End_Point |
|
