手腕夾緊扭矩限制
| 描述 |
透過手腕夾緊扭矩限制設定,可啟用或停用機器人腕關節最大夾緊扭矩的限制。 依預設啟用此限制。 此安全功能會限制手腕在進行推動時能施加多少扭矩。
|
|
手腕夾緊扭矩限制詳細資訊 |
啟用之後,機器人會限制腕關節的扭矩,以防止手腕、有效負載和機器人的下臂之間夾緊。 啟用此設定後,也會為底座、肩部和肘部關節的施加扭矩視窗定義一個非安全額定上限制。 在力控制應用中,可達到的接觸力可能大幅低於在工具力限制和肘部力限制安全功能中所指定的力。
啟用之後,機器人能對手腕關節施加更大推力,例如在力控制應用中。 停用此功能之後,應透過其他方式減低機器人手腕、有效負載和下臂間夾住的風險。 此安全功能在所有機器人上預設為啟用。 在 PolyScope X 版本 10.12 及更高版本中,可停用此安全功能。
|
|
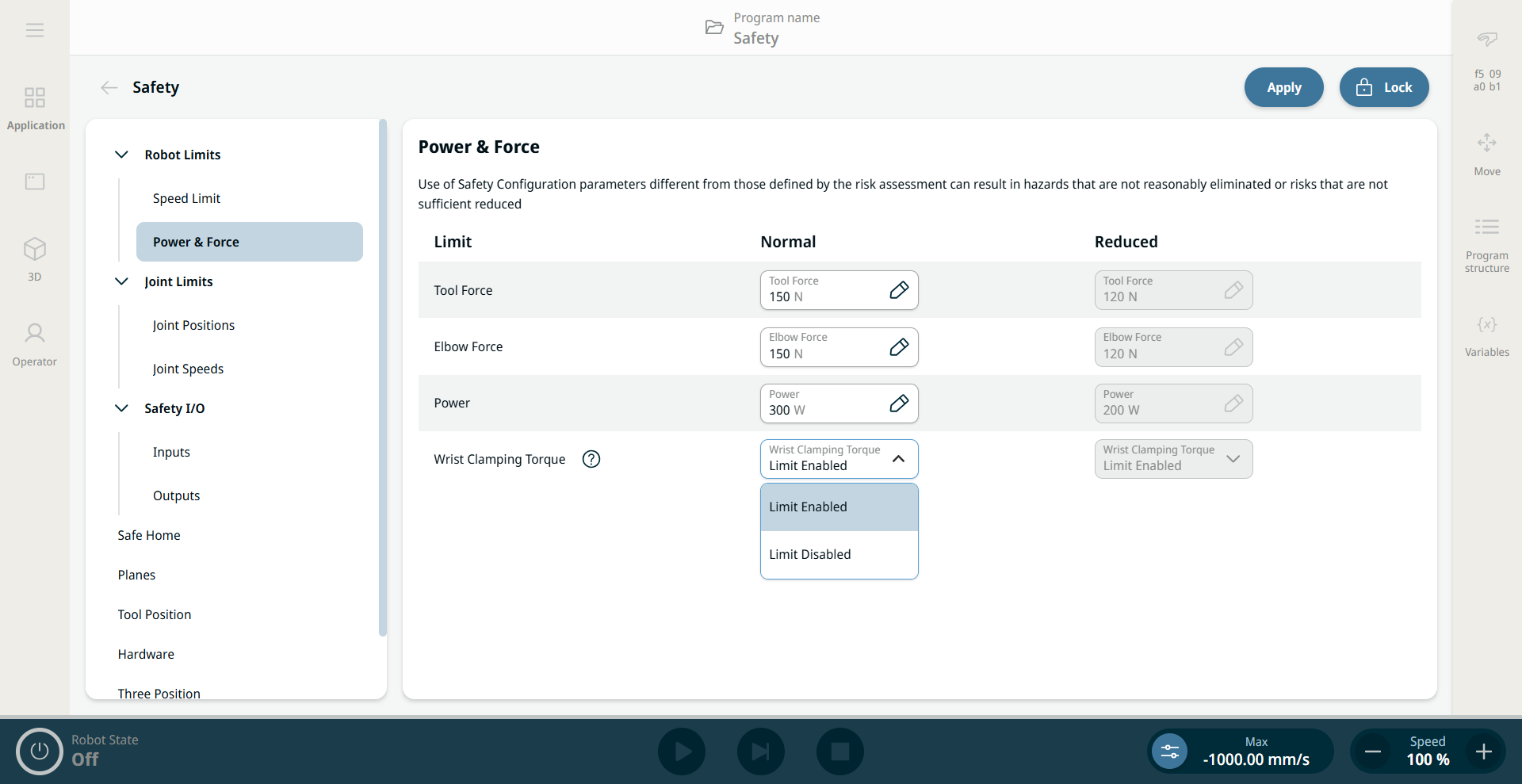
啟用和停用手腕夾緊扭矩限制 |
|