機器人限制
| 描述 |
機器人限制將限制一般的機器人運動。
安全限制將力和運動限制在工具法蘭和兩個由使用者定義的工具位置的中心
|
| 速度限制 | 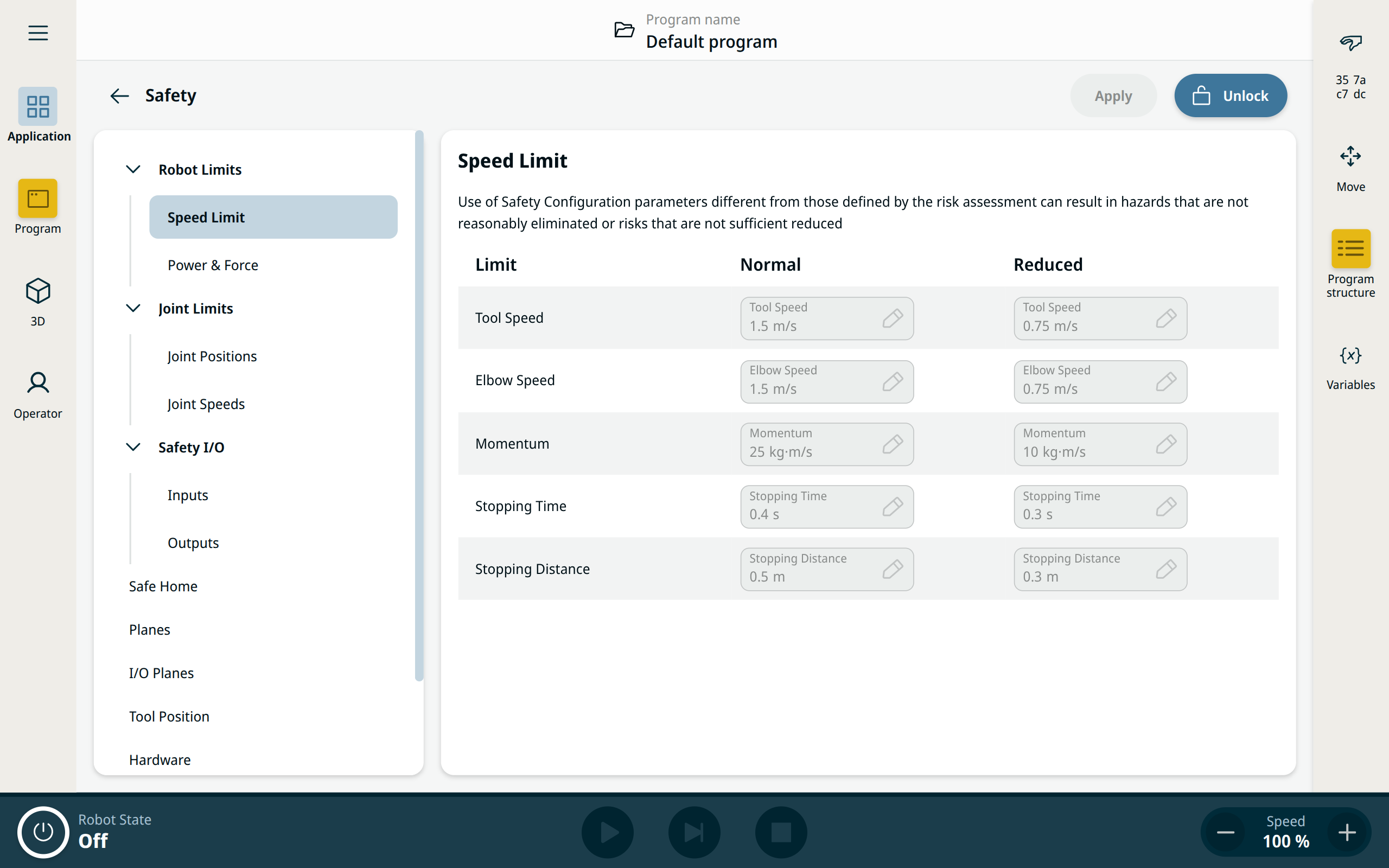
限制停止时间和距离会影响机器人的整体速度。 例如,如果停止时间设置为300 ms ,则最大机器人速度将受到限制,允许机器人在300 ms内停止。
|
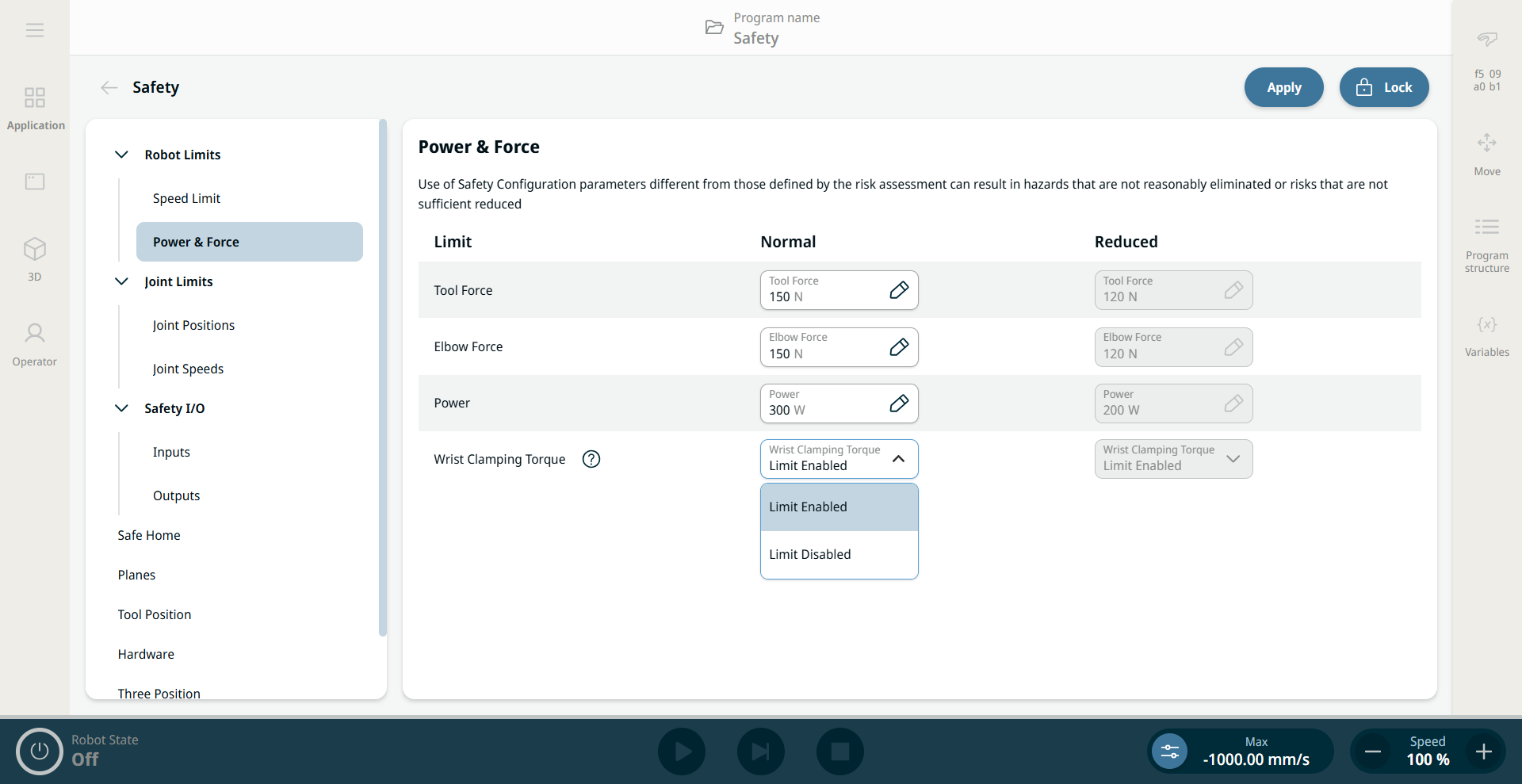
| 功率和力 |
如果停用「手腕夾緊扭矩」安全功能,三個手腕關節的作用力可能會超出工具和肘部力
|
| 安全模式 |
即沒有啟用保護性停止,安全系統都會在一種安全模式下動作,每種模式都有關聯的安全限制設定:
|