I/O 平面
| 描述 |
與標準安全平面相比,I/O Planes功能可更靈活地使用安全平面。 安全平面功能。 它可讓您使用終端輸入啟動和停用安全平面,和/或當安全球跨越安全平面時產生輸出信號。
|
|
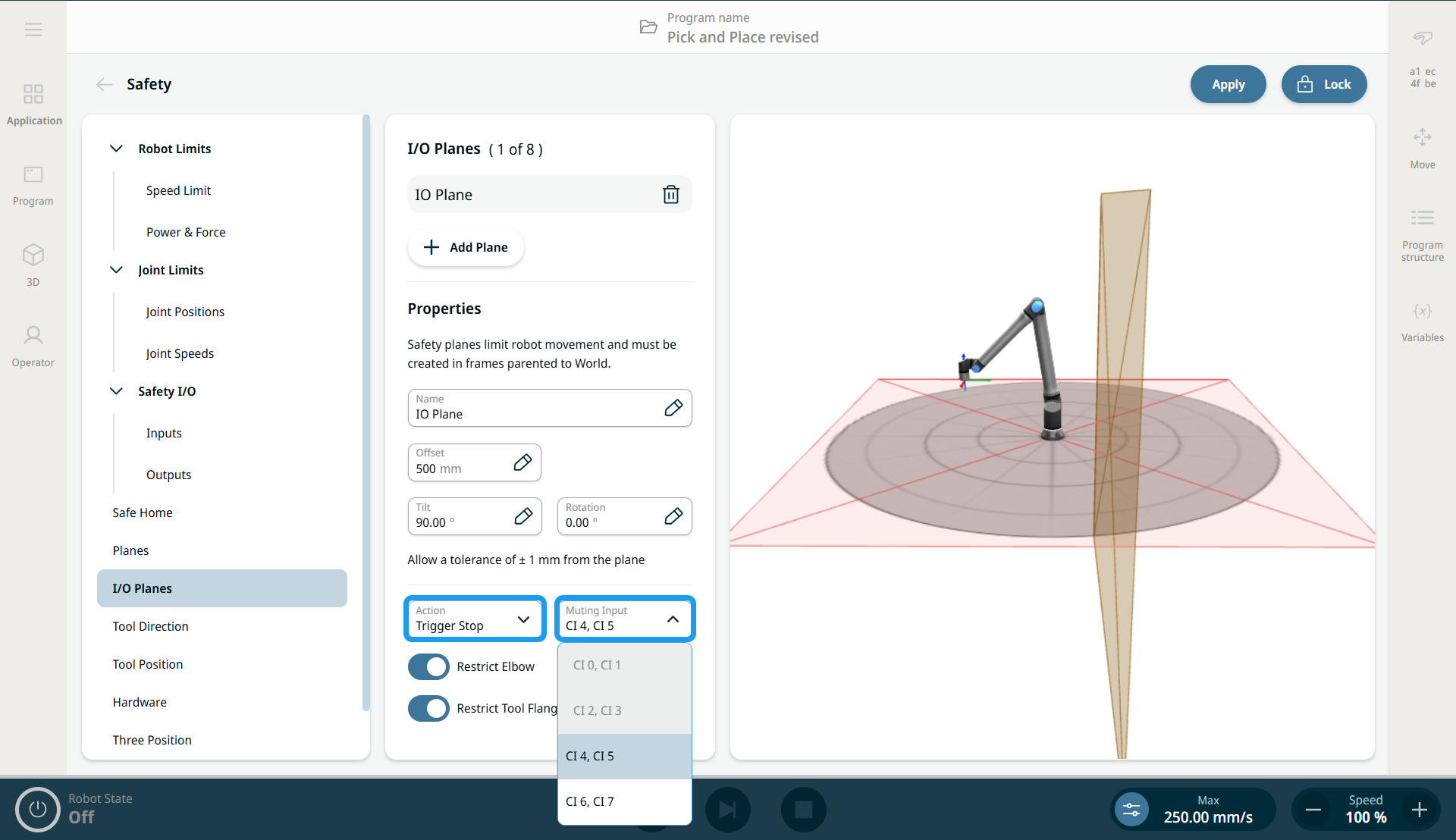
輸入/停止平面 |
Trigger Stop(觸發停止)會觸發 I/O 平面停止。 可使用安全輸入將其靜音。 除非靜音,否則朝飛機方向移動會導致機器人停止並等待,直到安全輸入將飛機靜音。 當平面處於非活動狀態時,機器人可自由移動。 當平面處於作用中且機器人尚未橫越平面時,機器人會在橫越平面前停止。 如果平面被啟動,當機器人在平面邊緣移動時,機器人最終可能會橫越平面,在最壞的情況下會根據設定的距離和停止時間限制停止。 當平面啟動且機器人越過平面後,機器人會依照設定的停止距離和停止時間限制停止。 |
|
|
|
|
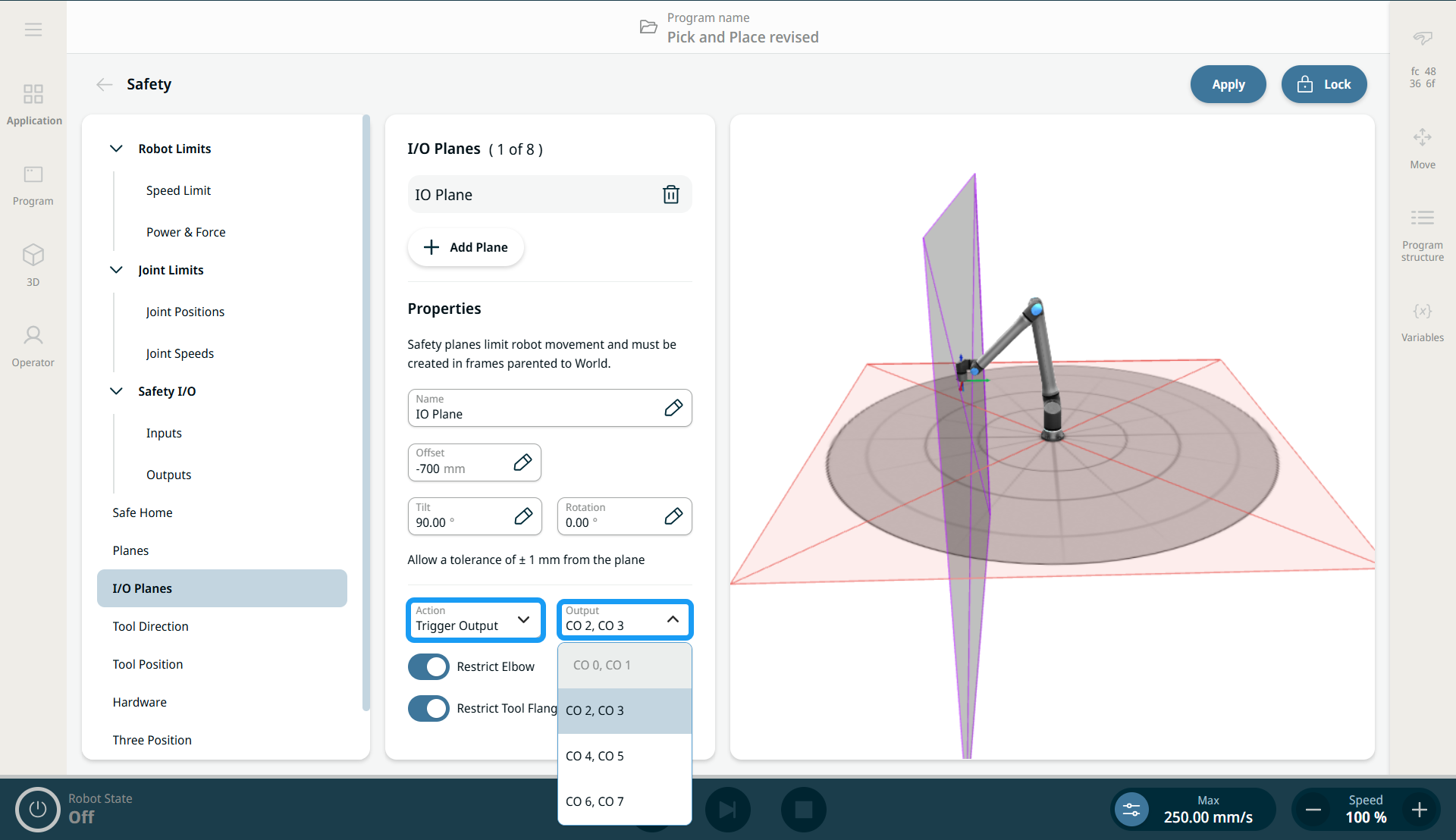
輸出平面 |
觸發輸出(Trigger Output)會根據一個或多個安全球是否越過平面產生安全輸出。 當一個或多個安全球體越過定義為觸發輸出的平面時,與該平面相對應的安全輸出被啟動。 「啟動 」表示安全輸出電氣設定為 「低」。 當任何一個安全球體越過定義為觸發輸出的平面時,與該平面相對應的安全輸出就會啟動。
|