安全家园
| 描述 |
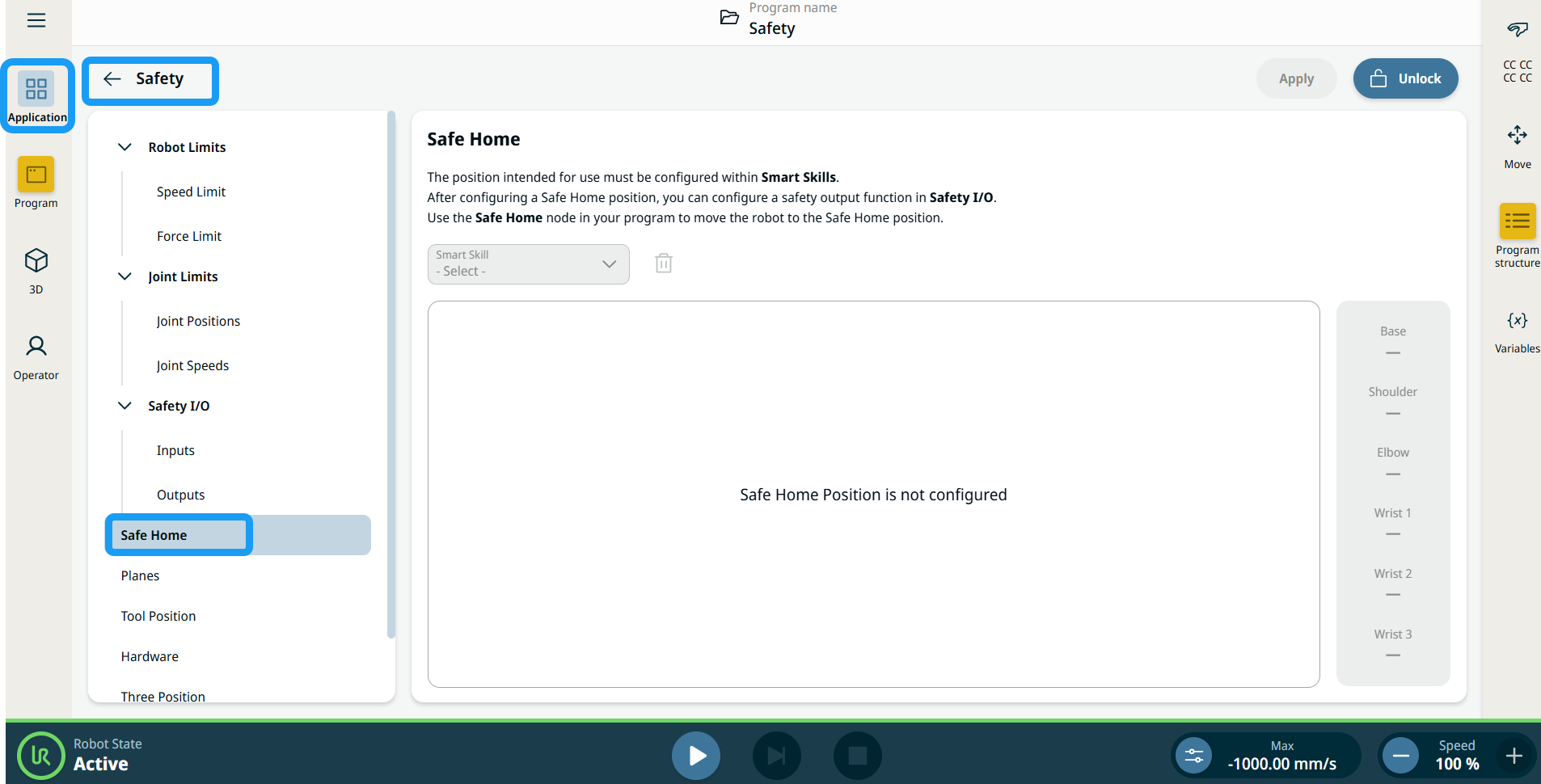
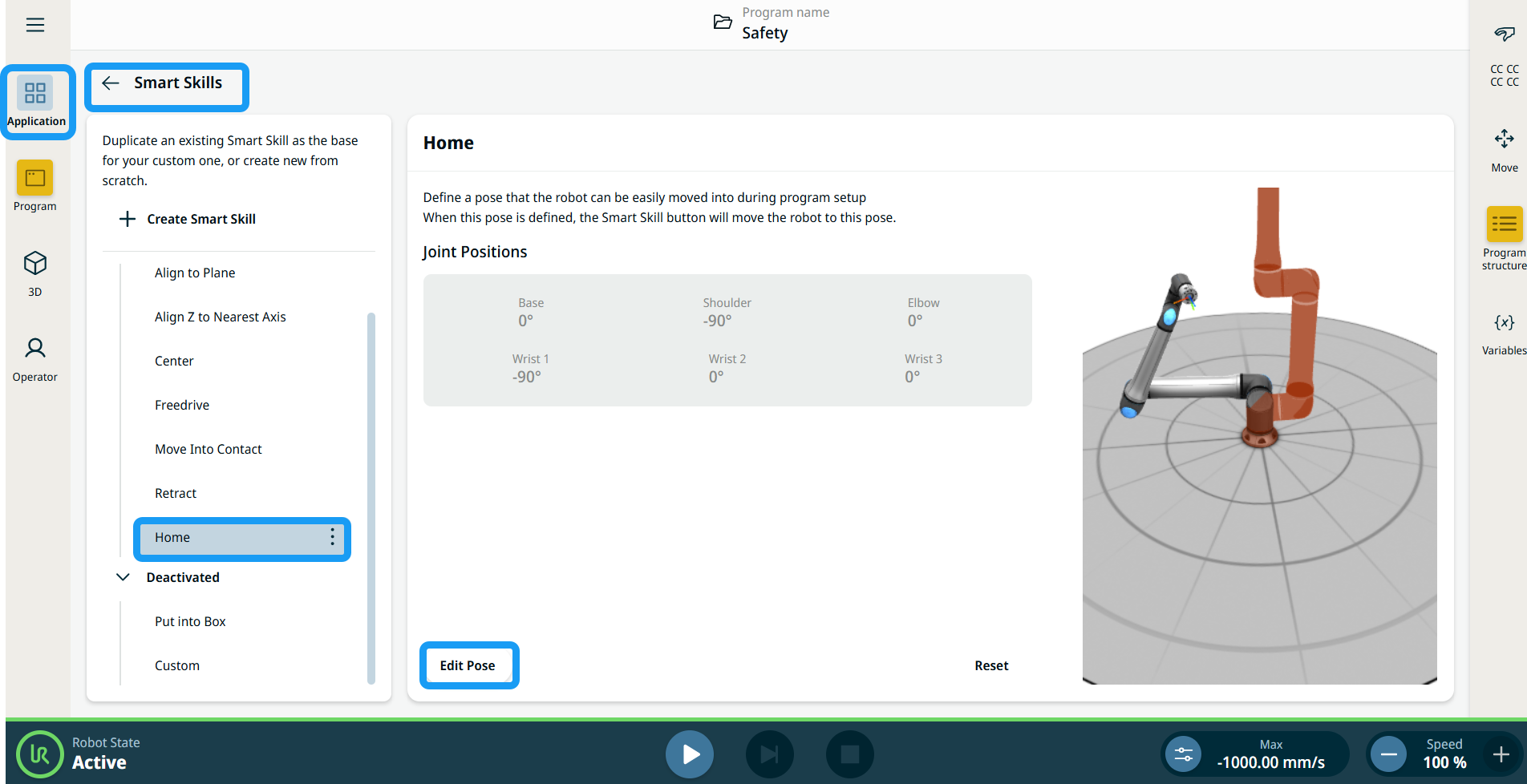
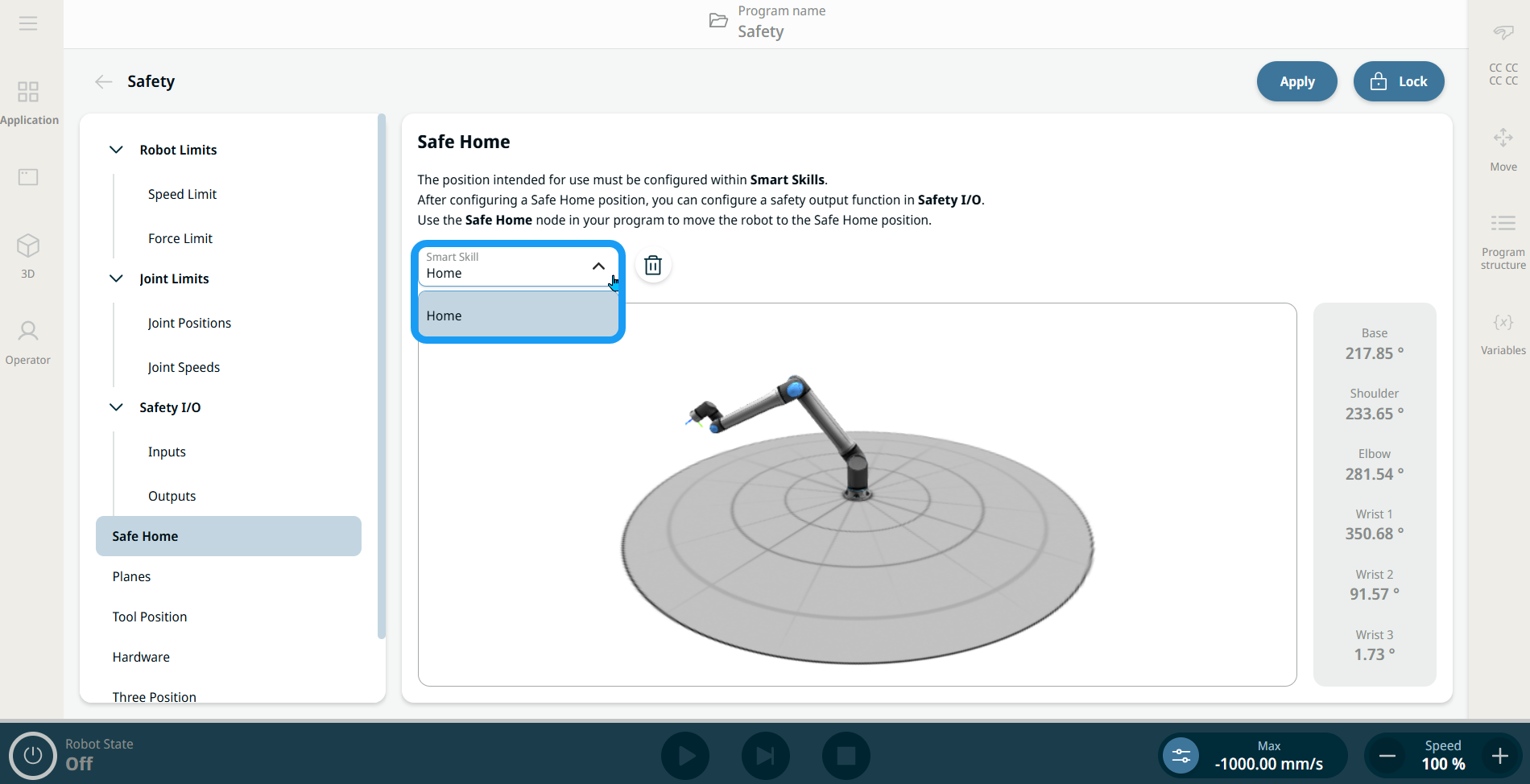
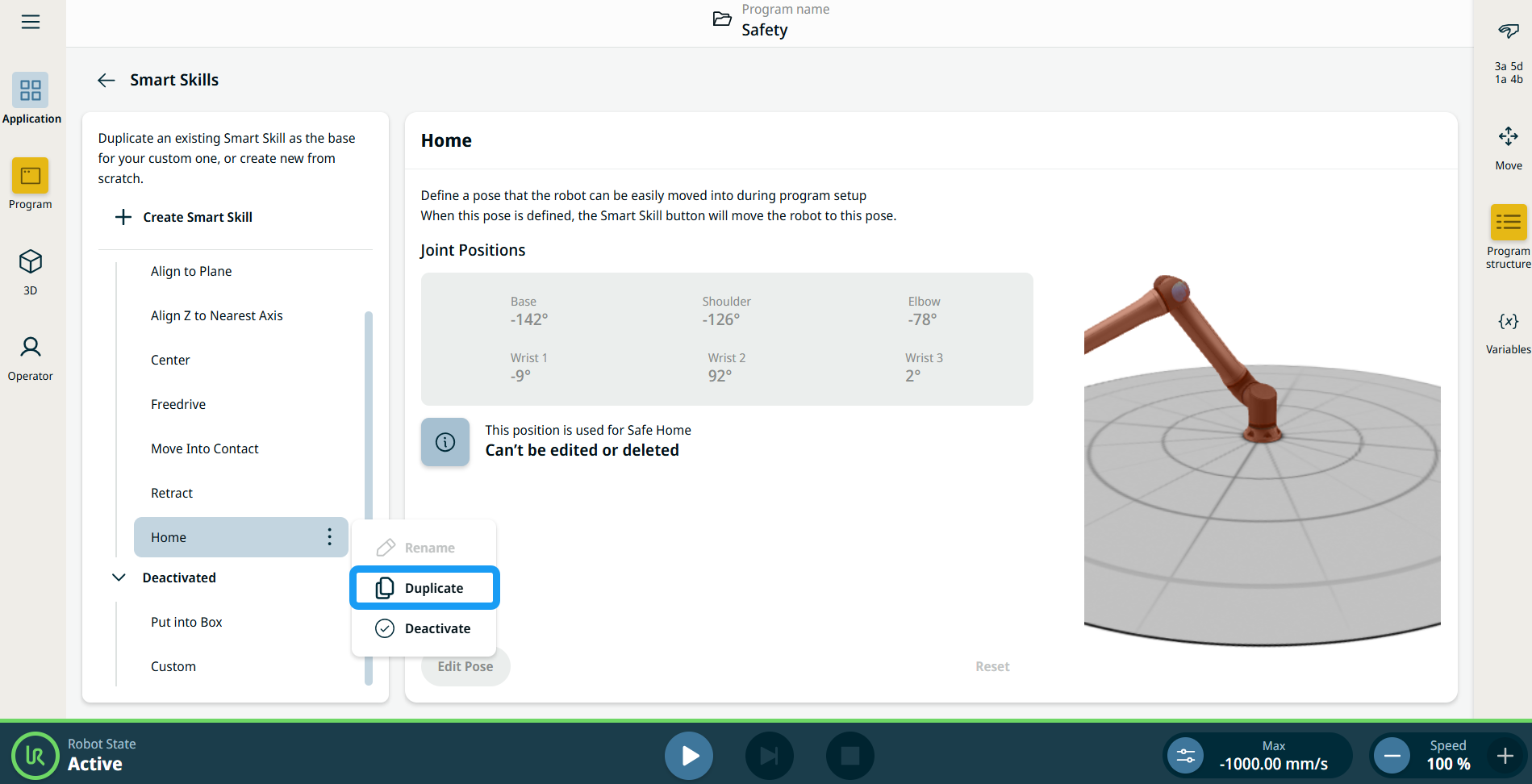
安全原点是一项 PolyScope X 功能,借助此功能,用户可以定义当机器人到达配置的安全原点位置时激活的安全相关输出。 用户在可被指定为安全原点位置参考的可用位置智能技能下拉列表中选择原点。
|
|
访问安全原点 |
|
|
|
|
|
|
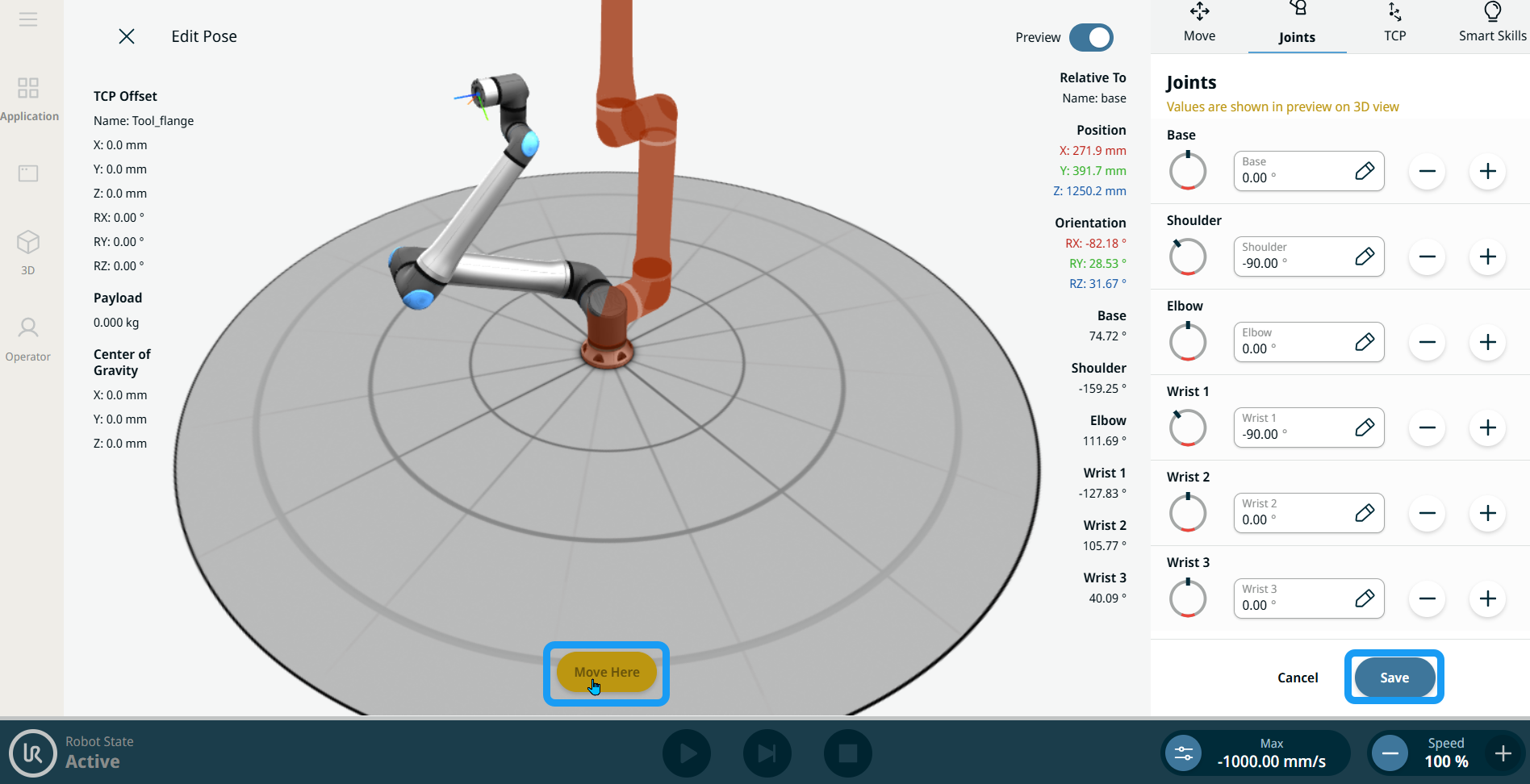
如果将“Position Smart Skill”选作“安全原点”的位置参考:
|
|
输出中的安全原点功能 |
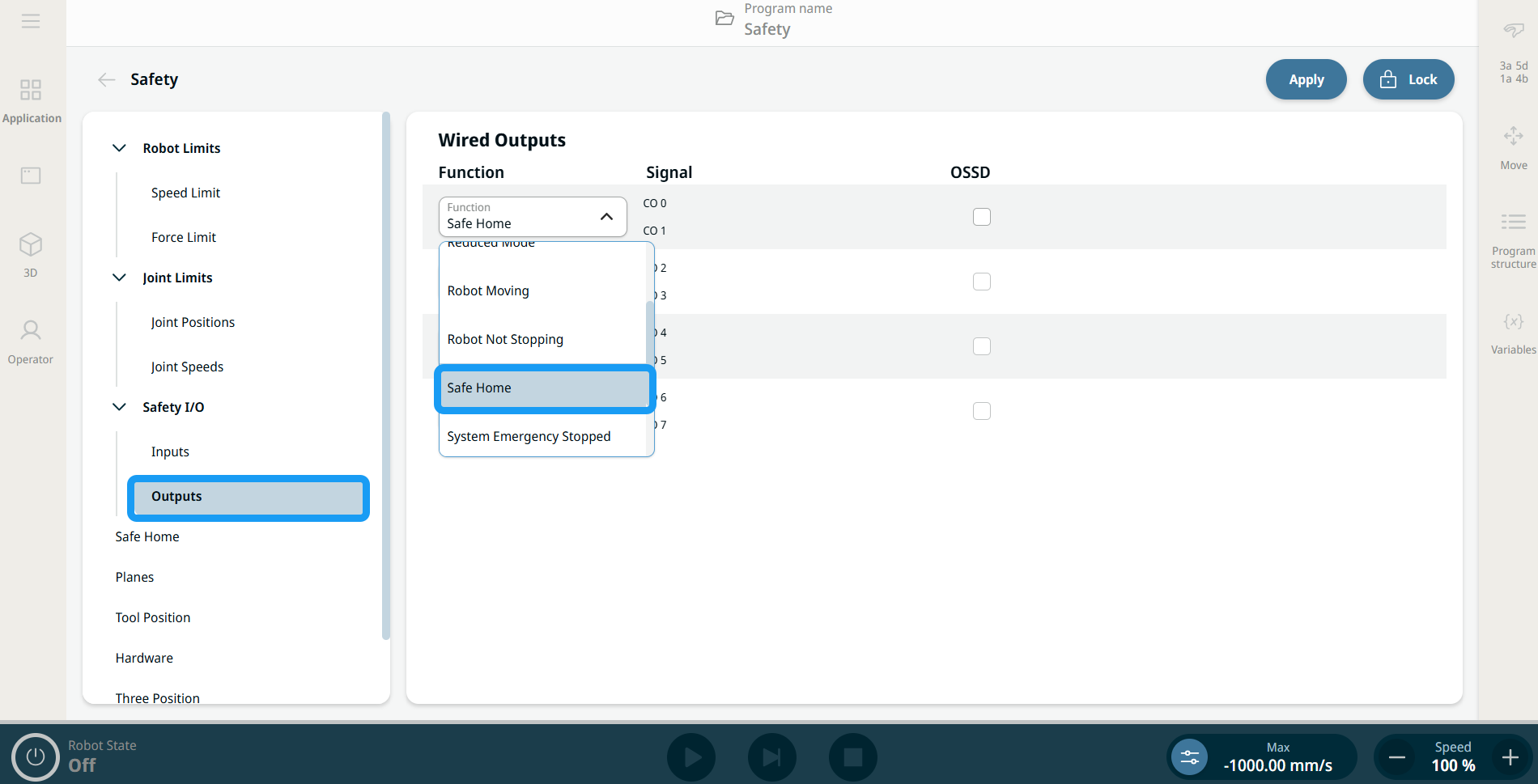
如果在安全中将原点位置指定为某个位置智能技能,则安全输出功能下拉列表会包含安全原点作为新功能指定。 在安全 I/O 输出的功能字段中选择安全原点。
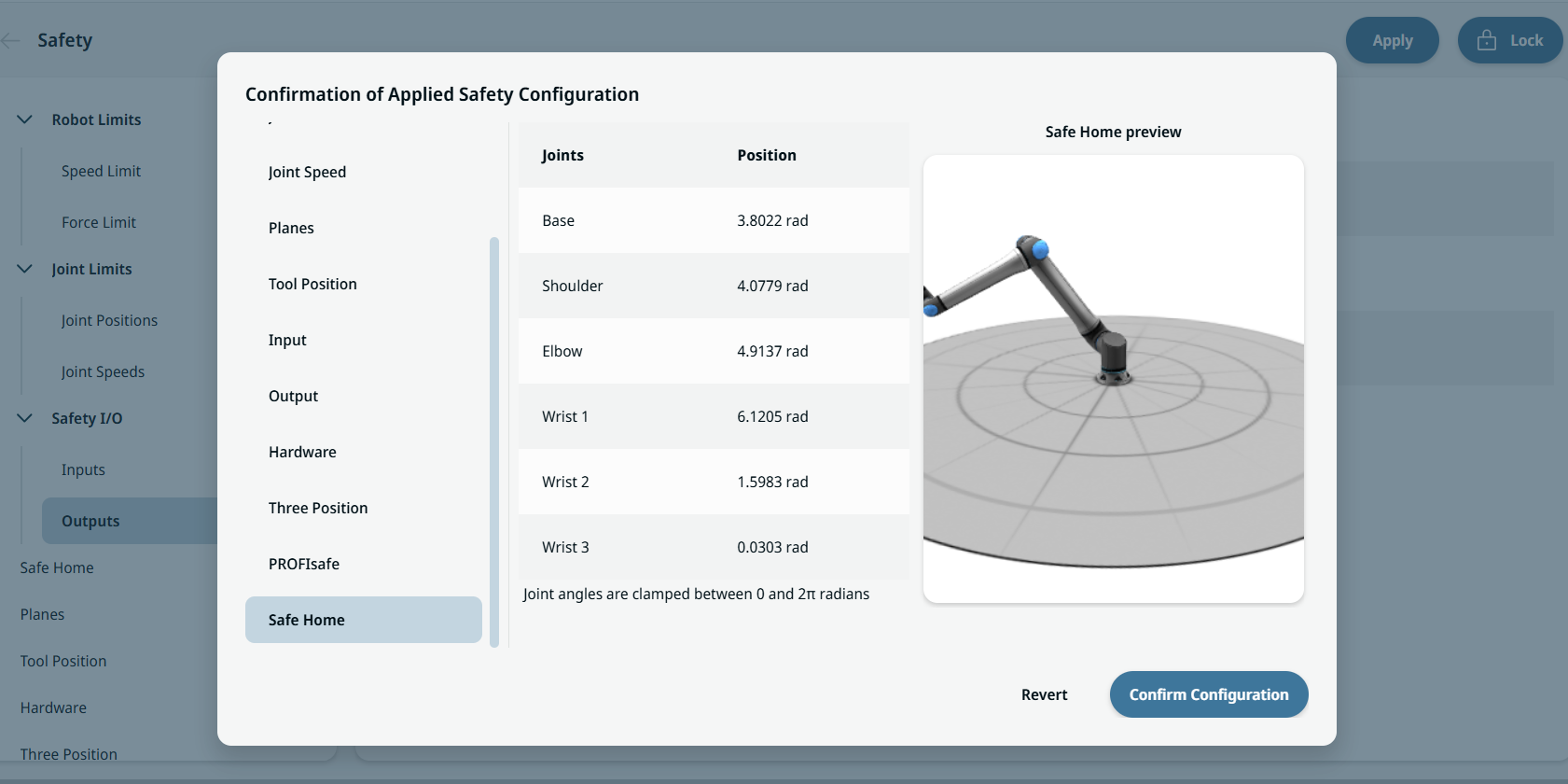
可以在确认应用的安全配置概览对话框中的功能分配表中看到安全原点。
|
|
安全原点作为程序节点 |
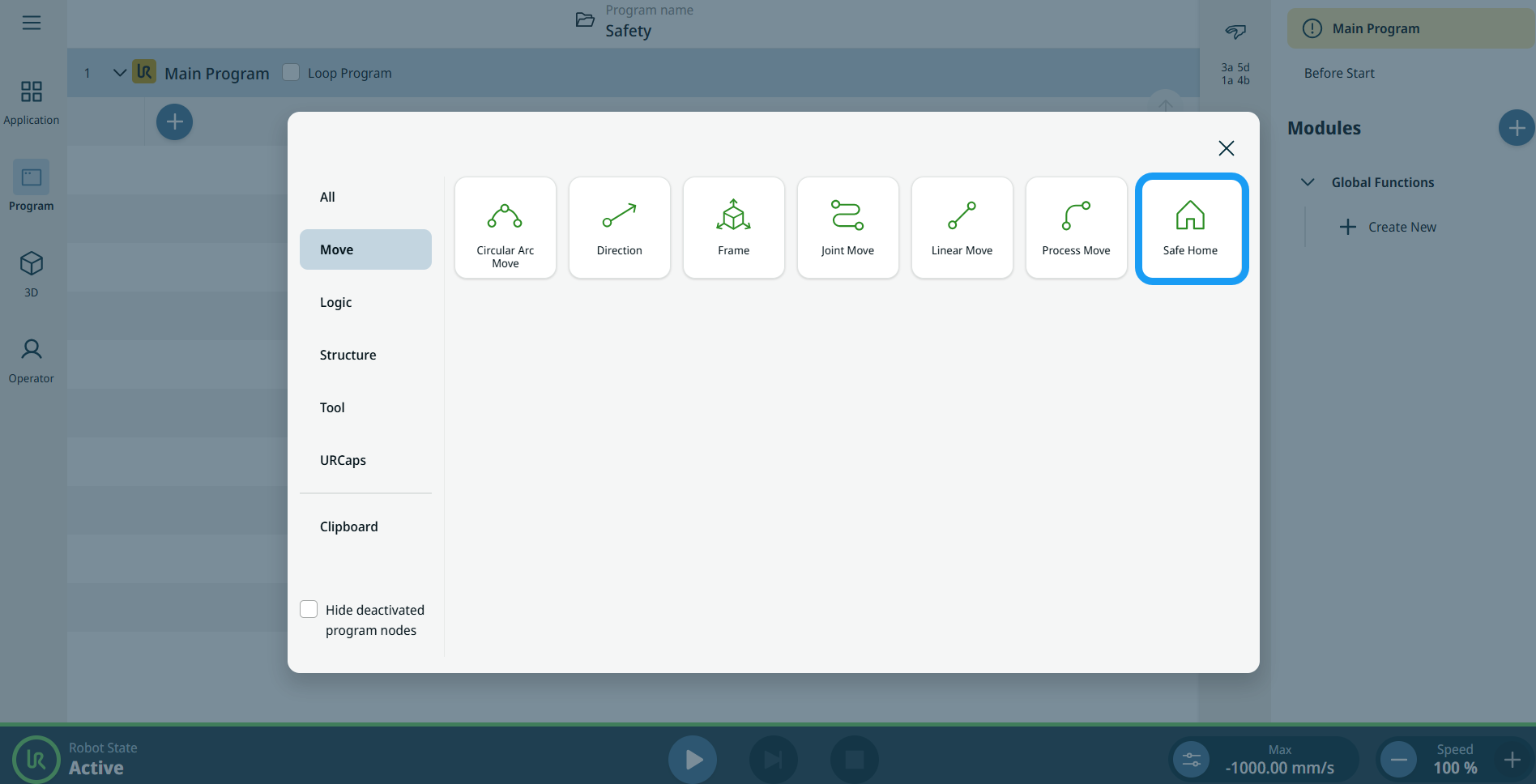
安全原点程序节点位于命令节点内的移动节点类别下。 此节点用于命令机器人移动到其预定义的安全原点位置,该位置在安全应用的安全原点设置中进行配置。
如果添加节点时未在安全应用中配置安全原点位置,则会将该节点标为黄色。

点按省略号图标
|
 时,安全原点命令节点将包含运动配置文件选项和其他高级设置。
时,安全原点命令节点将包含运动配置文件选项和其他高级设置。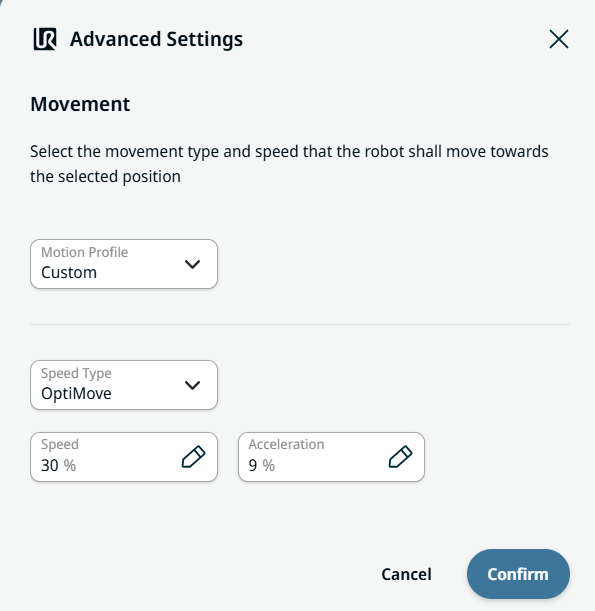
| 高级设置 |
用户可以在“高级设置”中使用两个选项卡和两个字段创建移动配置文件:
借助运动配置文件功能,用户可以在移动节点中设置预定义运动配置文件:关节移动、线性移动、圆弧移动、过程移动和方向。 借助自定义运动配置文件,用户可以在移动节点中定义移动数据。 在速度类型字段中, OptiMove 为默认选项。 若需以度/秒或毫米/秒为单位输入速度和加速度,请选择 经典版 运动模式。 为了简化使用和设置,会以百分比形式指定 OptiMove 设置。 用户可以在“速度”选项卡中配置首选速度百分比,这会以机器人最大速度能力的百分比形式设置目标行进速度。 用户可以在“加速度”选项卡中配置首选加速度百分比,这会以机器人最大功率的百分比形式设置加速和减速期间的目标扭矩限值。
|