Process Move
| 描述 |
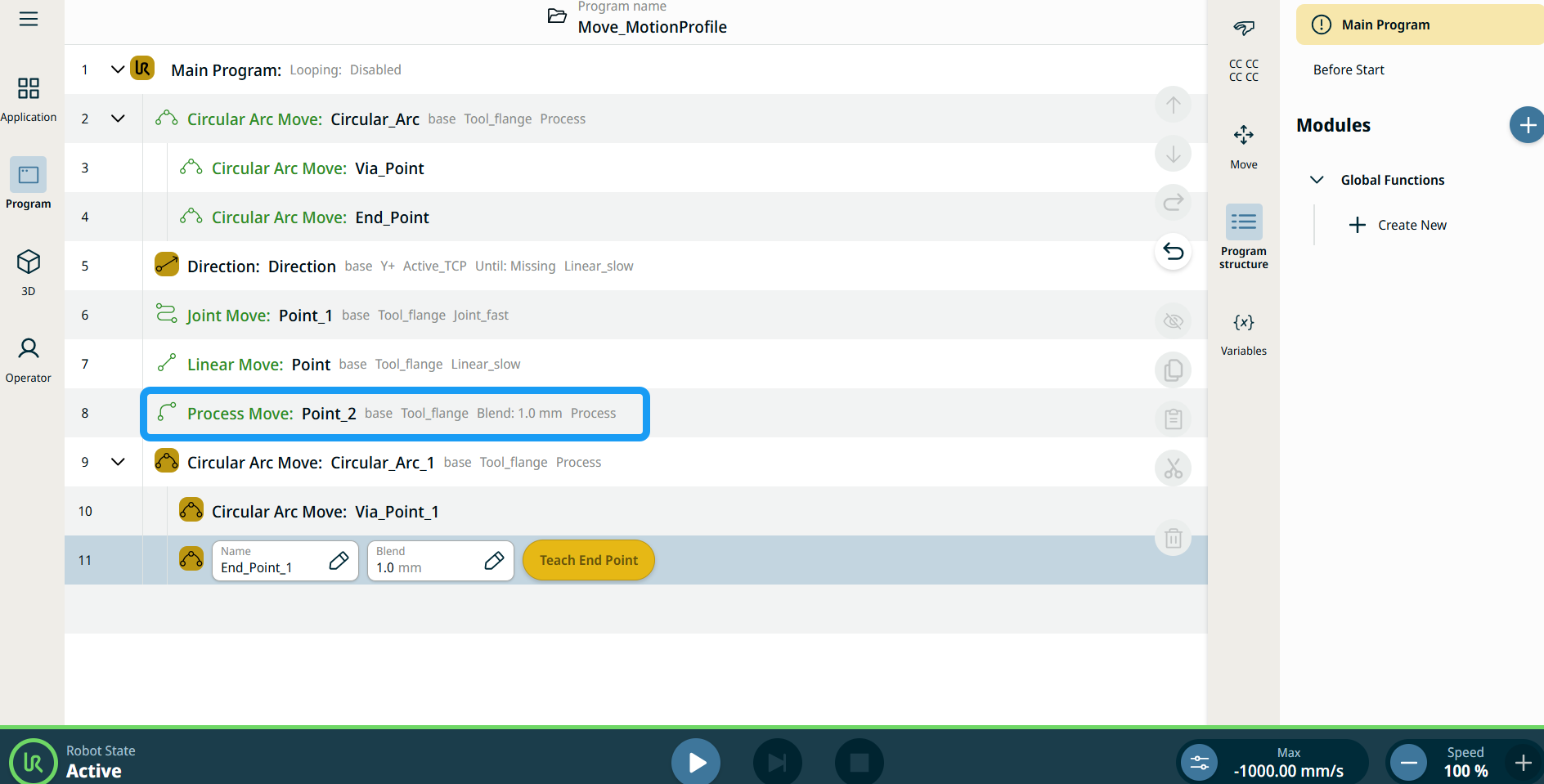
The Process Move command enables you to program a linear movement with constant speed through a number of points. You must set blend radius to make sure that the robot moves at a constant speed between each move node. You can specify a reference frame and a transform pose.
|
| To access Process Move command |
|
|
|
|


| 移动节点上的运动配置文件标签 |
程序树中所有与移动相关的命令节点都会显示与每个节点关联的运动配置文件。 利用此功能,用户可以查看移动节点上的所选运动配置文件。 此功能在以下命令节点实现: 带有自定义运动配置文件的移动节点将显示速度和加速度值,而不显示运动配置文件。 |
|
|
|
|
To use More Option |
|
