Linear Move
| 描述 |
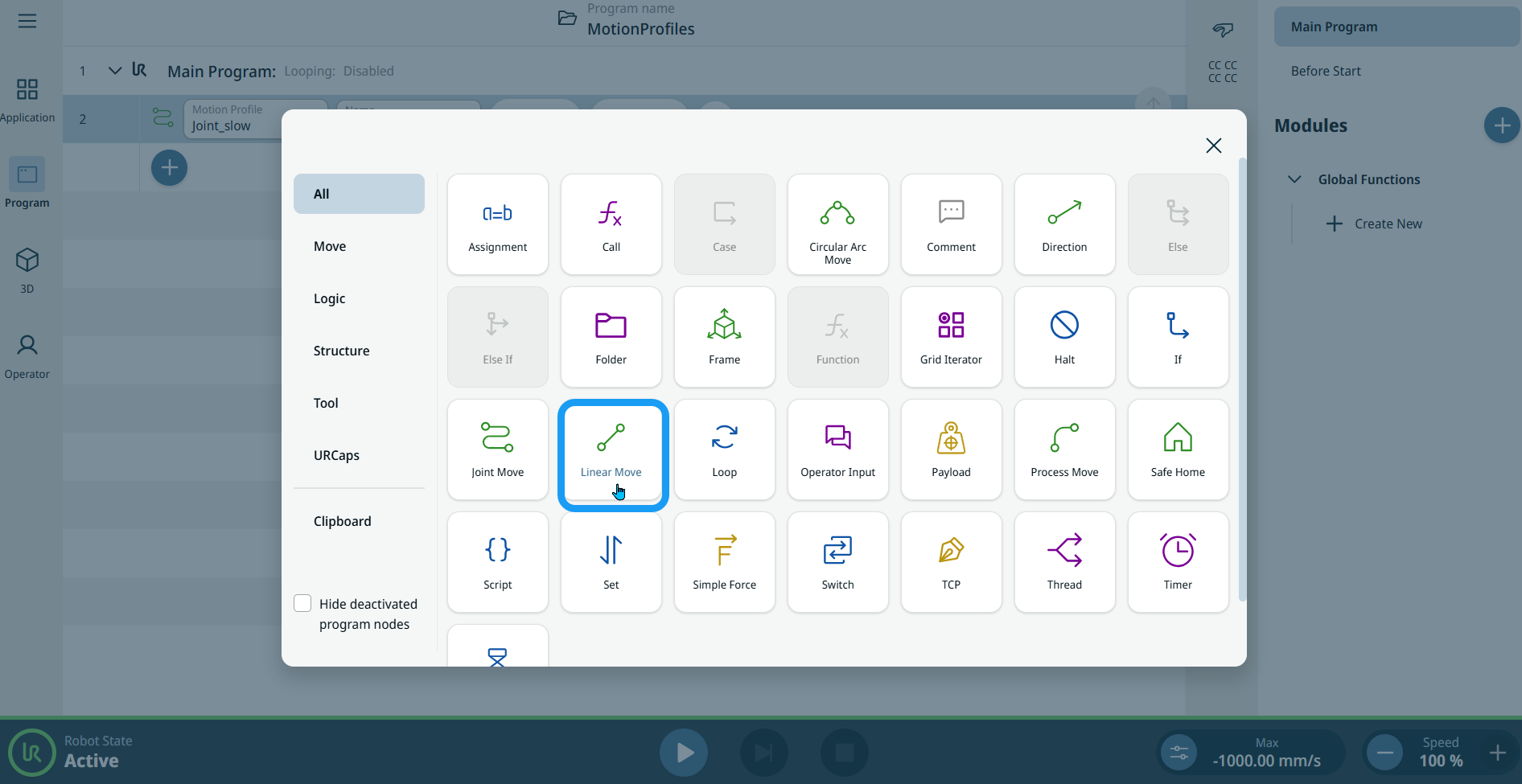
The Linear Move command node supports Motions Profiles as Joint Move, but it creates a movement that is a direct line from point A and point B. It moves the Tool Center Point (TCP) linearly between waypoints. 这意味着每个关节都会执行更复杂的运动,以使工具保持在直线路径上。
|
|
To access Linear Move command |
|
|
|
|
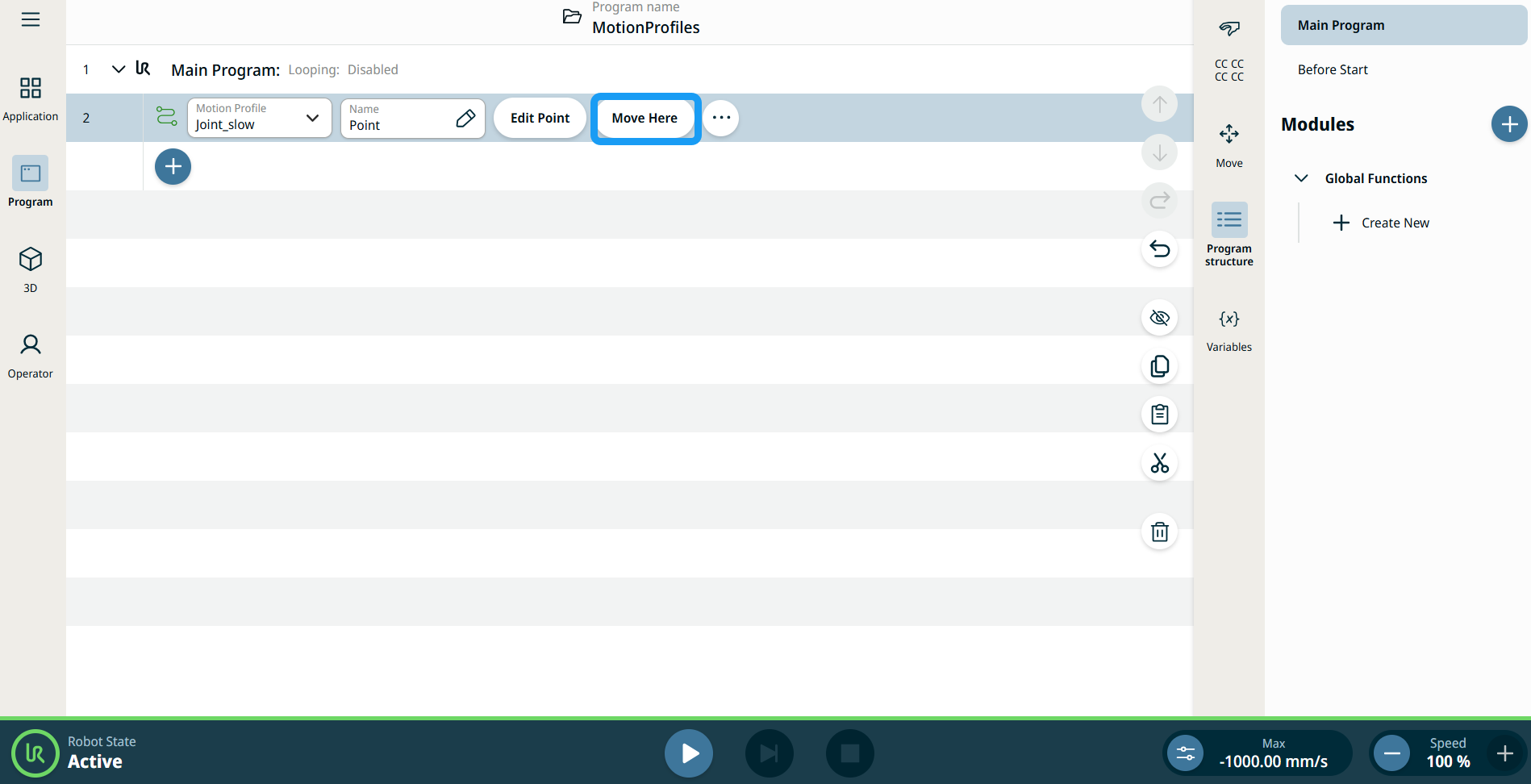
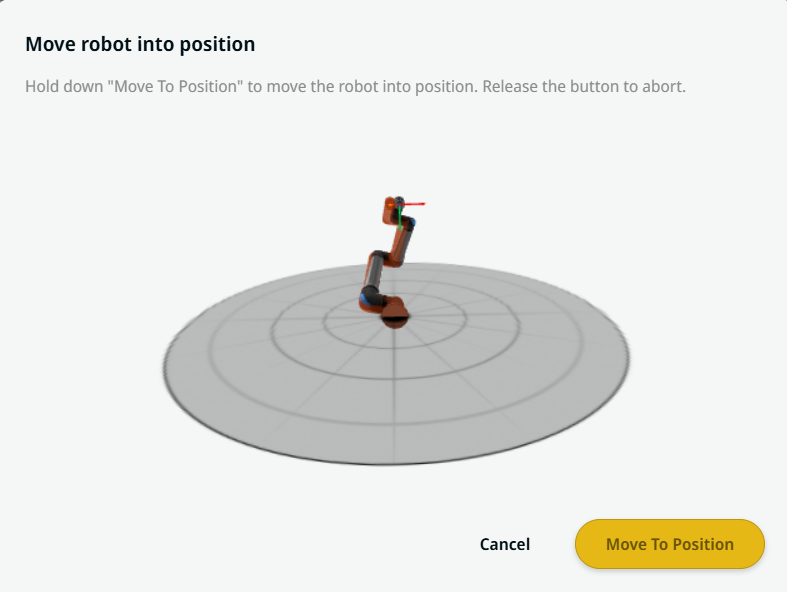
| 使用“移至此处”按钮 |
移至此处按钮会出现在Linear Move和Joint Move命令中。 借助此功能,您可以直接从程序树移动到路点的位置。 按下移至此处按钮会打开“将机器人移动就位”对话框。 此按钮在路点已示教的情况下显示,且仅会在机器人状态为正常或缩减模式时启用。
|
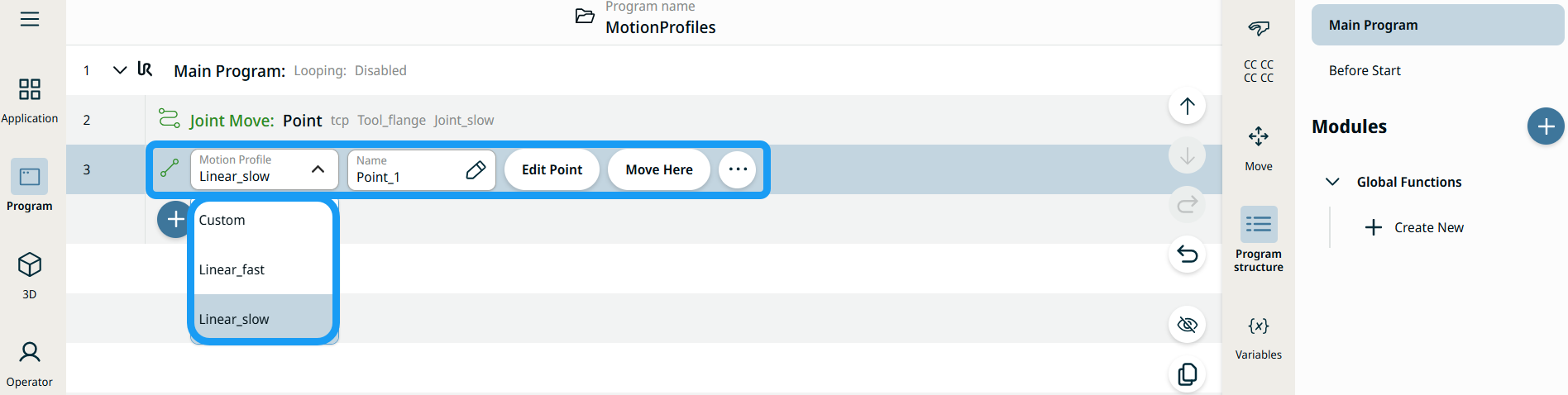
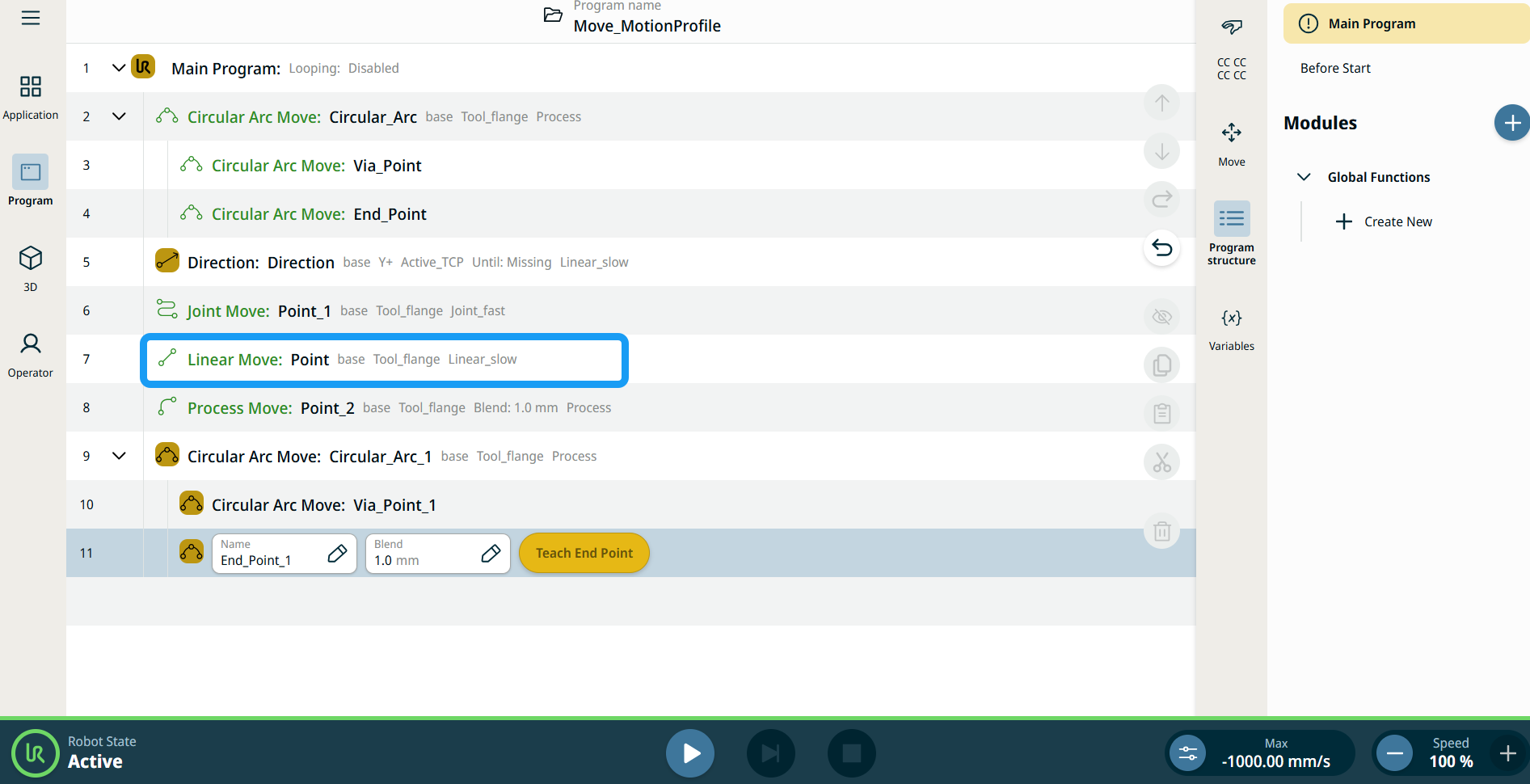
| 移动节点上的运动配置文件标签 |
程序树中所有与移动相关的命令节点都会显示与每个节点关联的运动配置文件。 利用此功能,用户可以查看移动节点上的所选运动配置文件。 此功能在以下命令节点实现: 带有自定义运动配置文件的移动节点将显示速度和加速度值,而不显示运动配置文件。 |
|
|
|
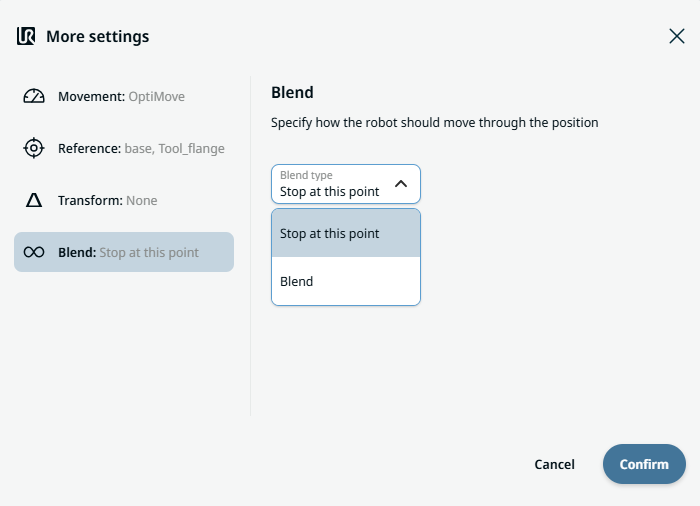
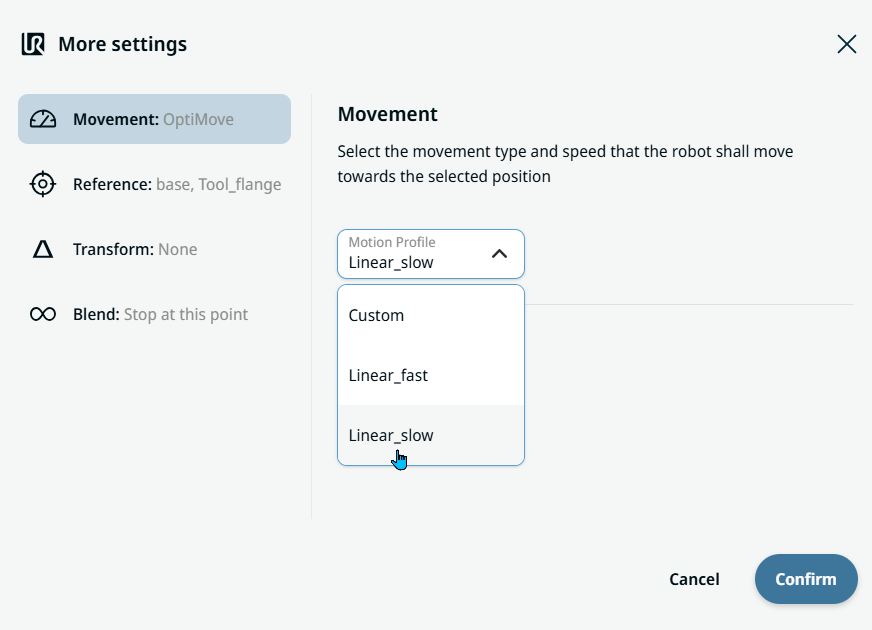
| Movement setting |
|
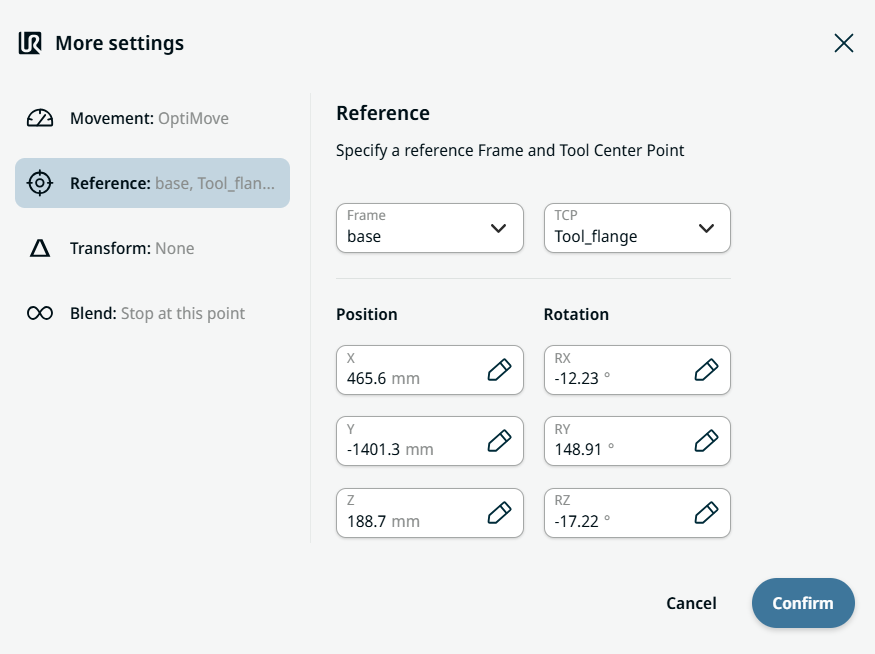
| Reference setting |
|
| Transform setting |
|
|
Blend setting |
|