Robot Sınırları
| Açıklama |
Robot Limitleri, genel robot hareketlerini sınırlar.
Güvenlik limitleri, uç ekipman flanşındaki ve kullanıcı tanımlı iki uç ekipman pozisyonunun merkezindeki kuvvetleri ve devinimleri sınırlar
|
| Hız Limitleri | 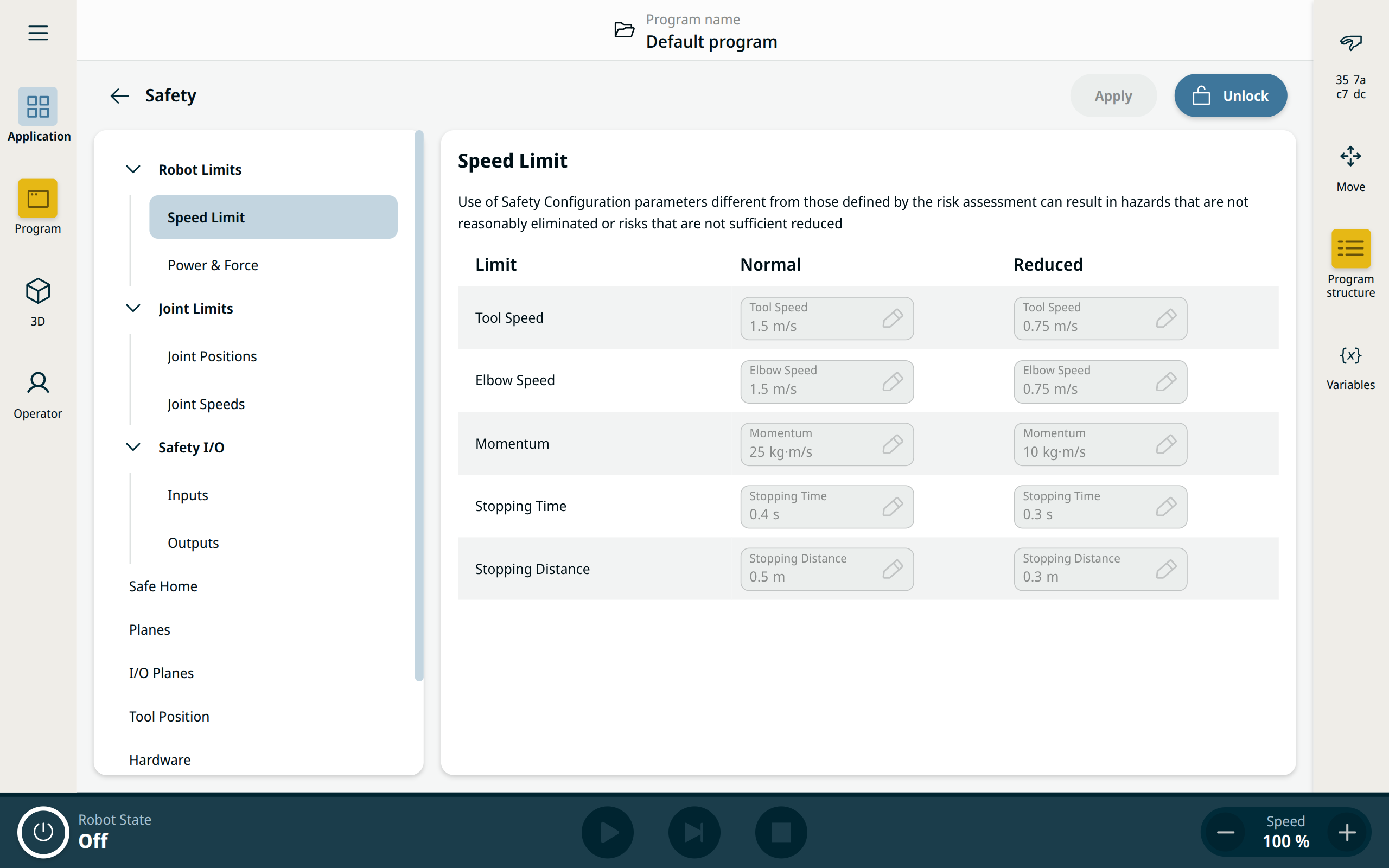
Durma süresini ve mesafesini kısıtlamak genel robot hızını etkiler. Örneğin, durma süresi 300 ms olarak ayarlanırsa, maksimum robot hızı robotun 300 ms içinde durmasına izin verecek şekilde sınırlıdır.
|
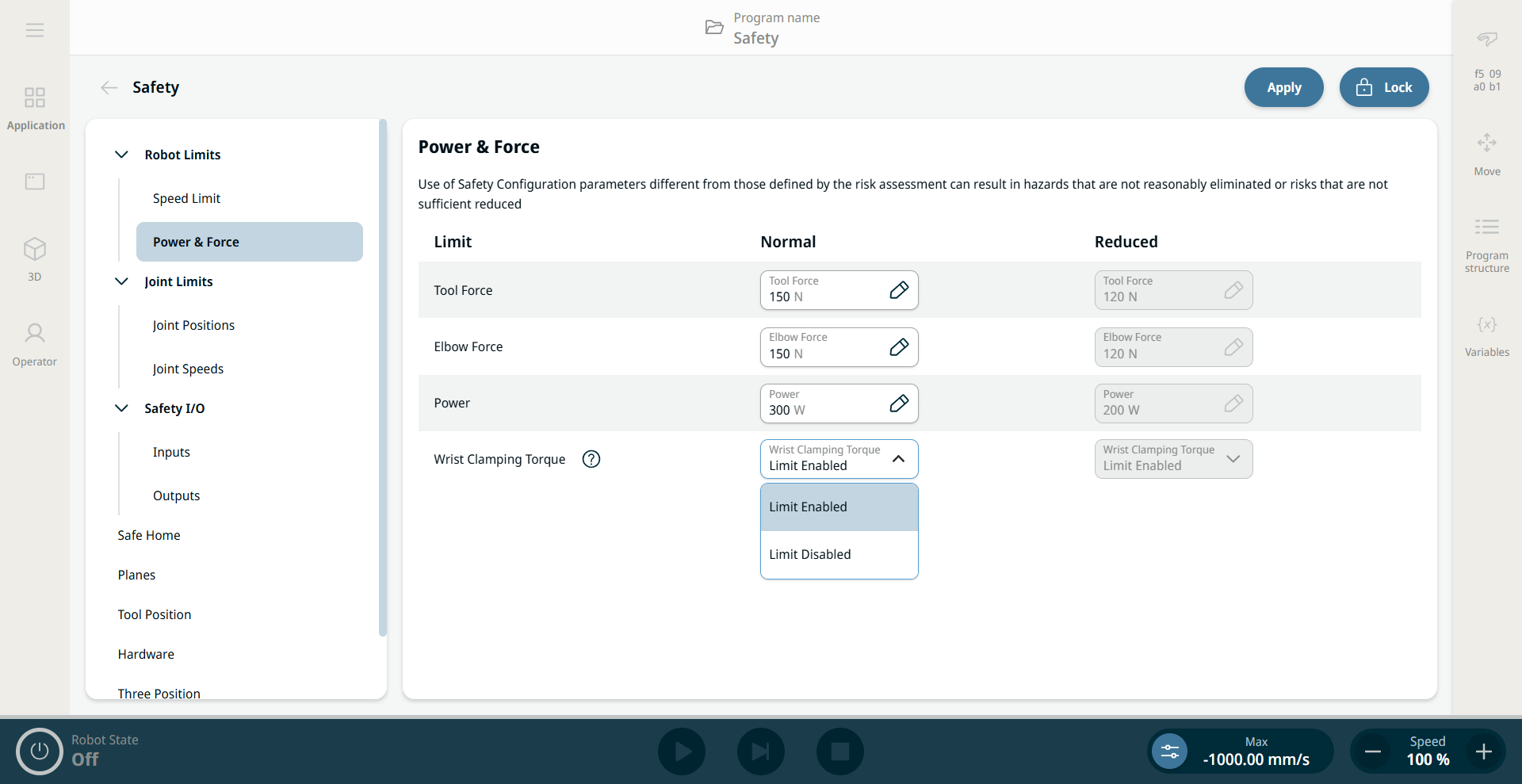
| Güç ve Kuvvet |
Uç ekipman ve bilek kuvvetleri, "bilek kelepçeleme torku" güvenlik işlevi devre dışıysa üç bilek eklemi kadar aşılabilir
|