Güvenli Ev
| Açıklama |
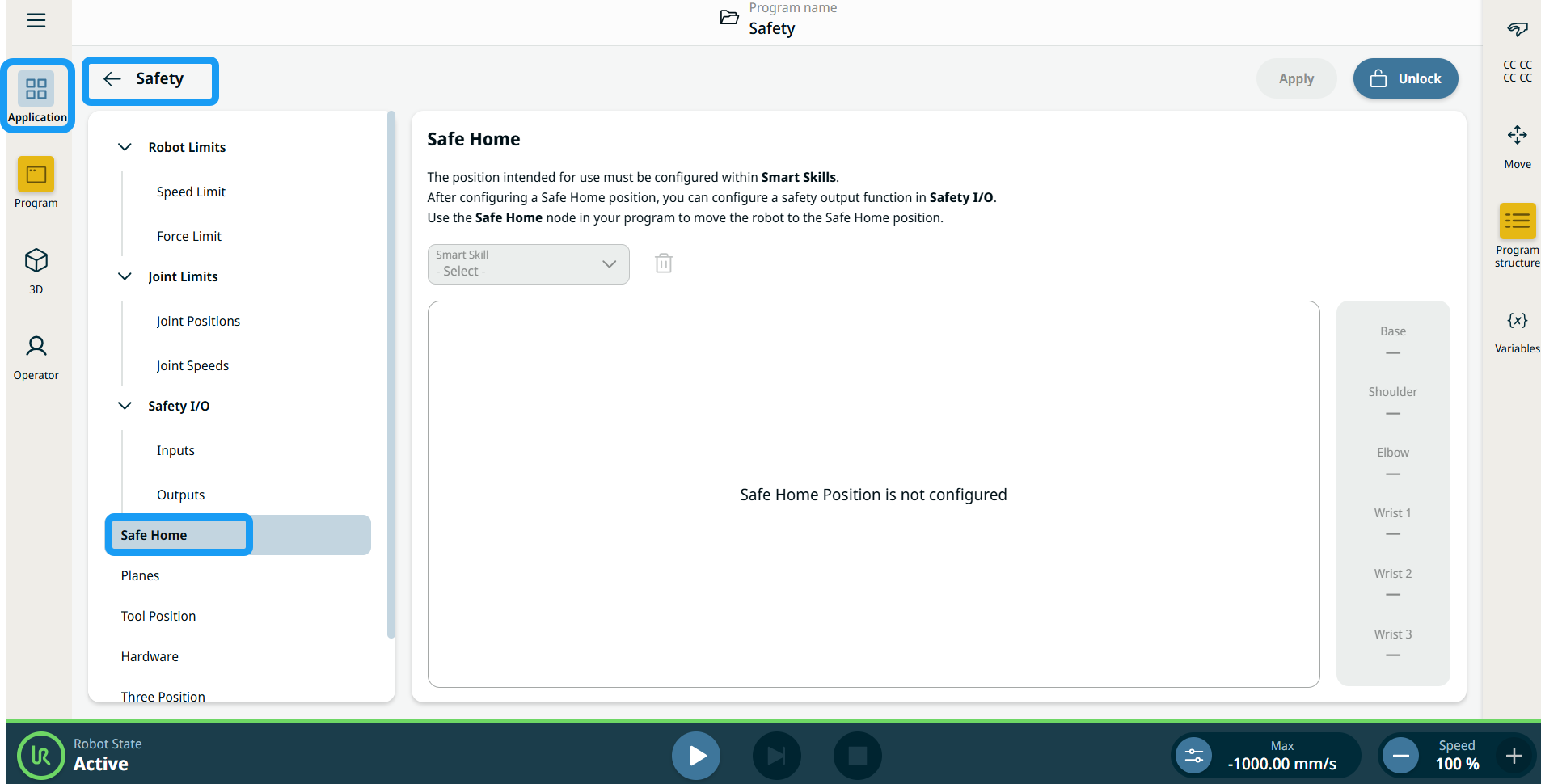
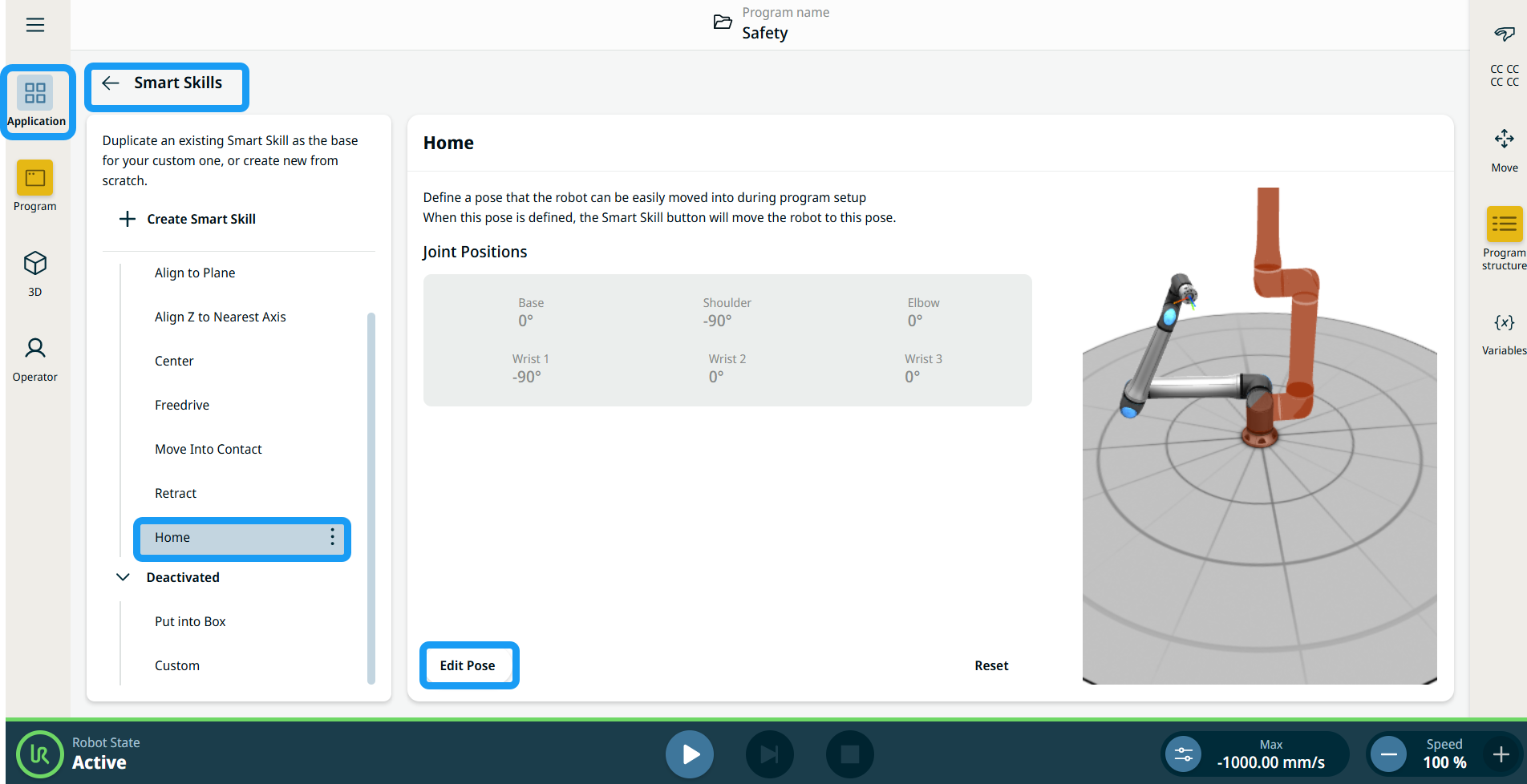
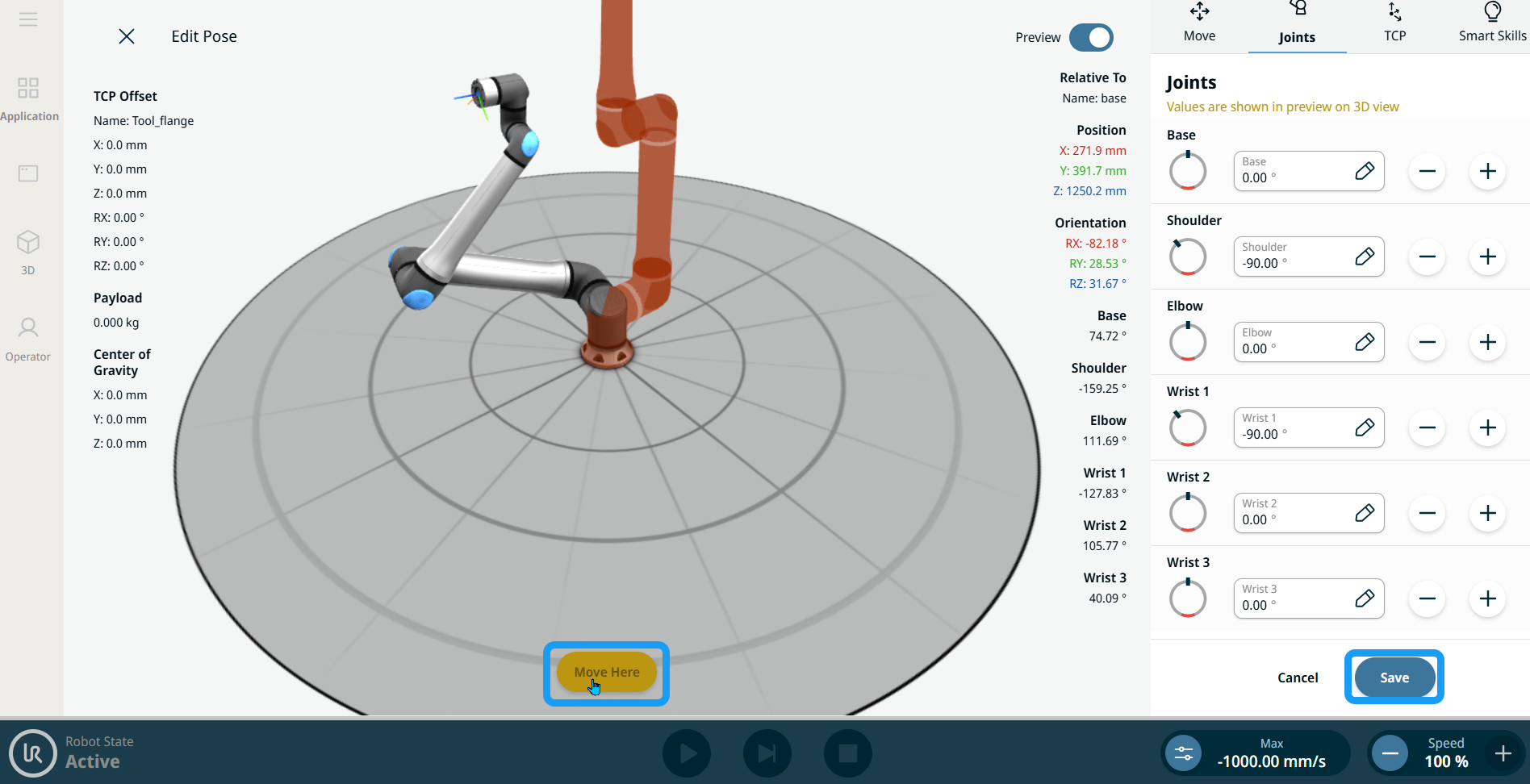
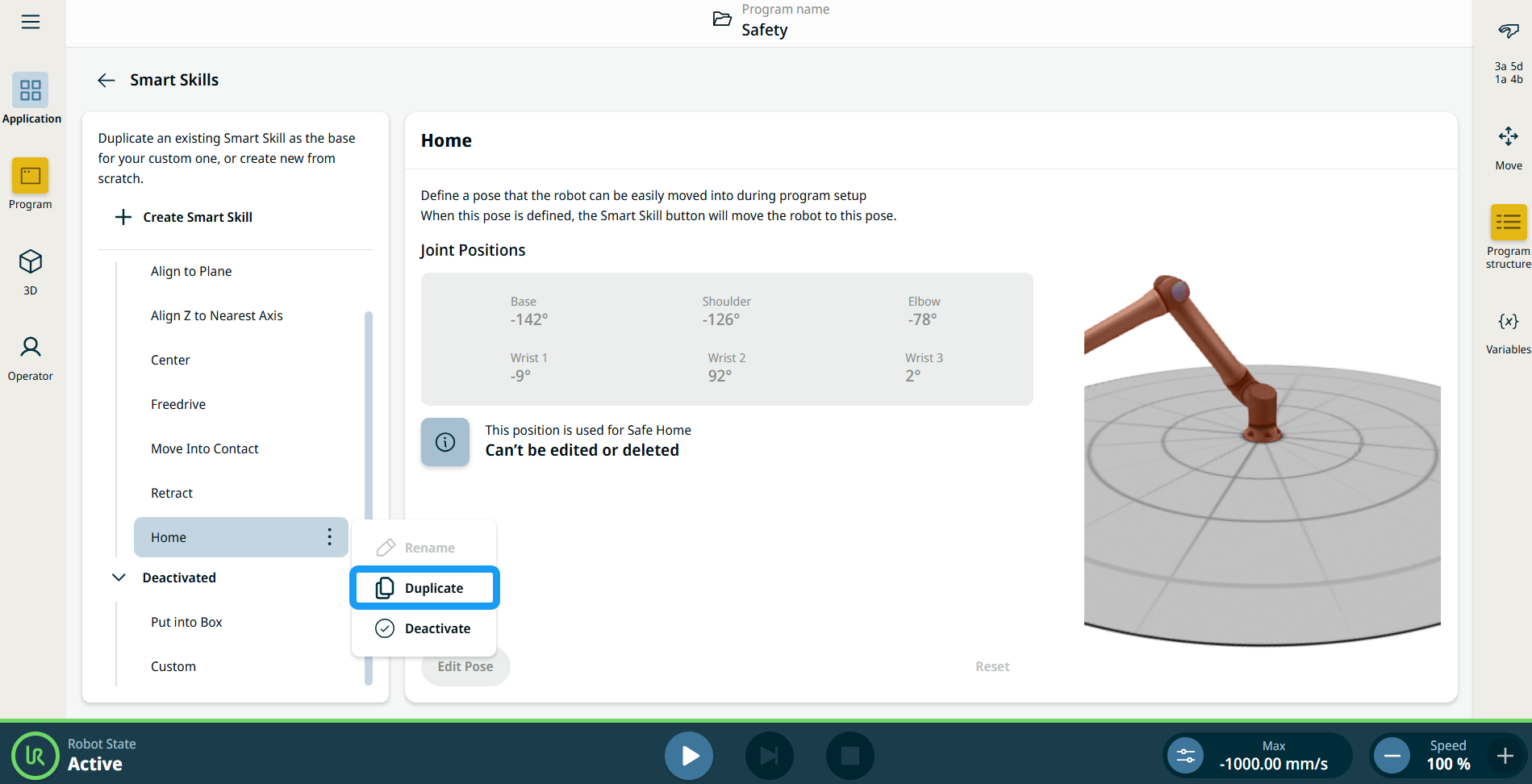
Güvenli Başlangıç, kullanıcıların robot yapılandırılmış güvenli başlangıç pozisyonuna ulaştığında etkinleşip güvenlikle ilgili bir çıkış tanımlamalarına imkan veren bir PolyScope X özelliğidir. Kullanıcı, Güvenli Başlangıç pozisyonu için referans olarak atanabilen kullanılabilir akıllı beceri pozisyonlarını gösteren açılır menüde Başlangıç seçeneğini belirler.
|
|
Güvenli Başlangıca Erişim |
|
|
|
|
|
|
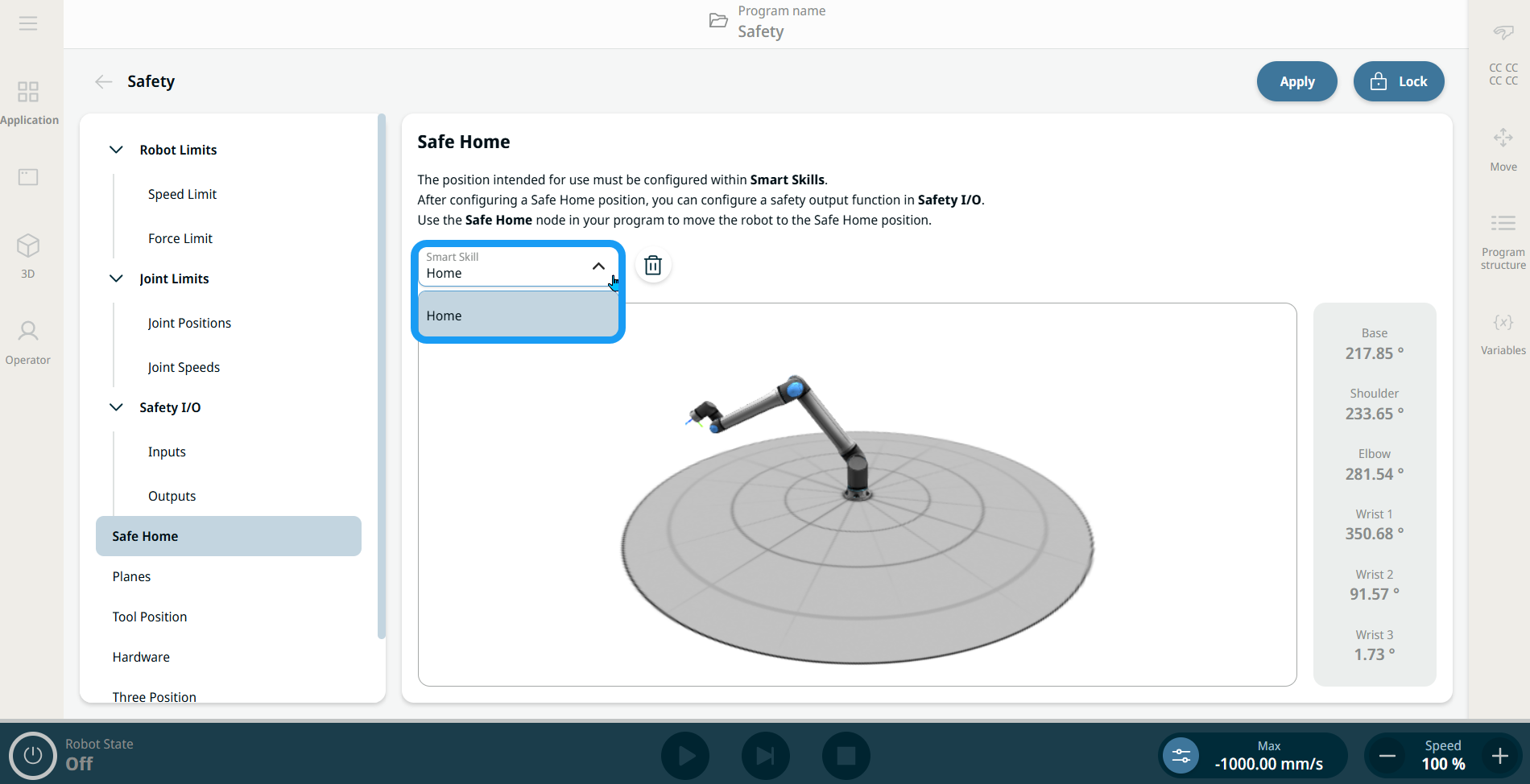
Safe Home için konum referansı olarak Position Smart Skill seçilirse:
|
|
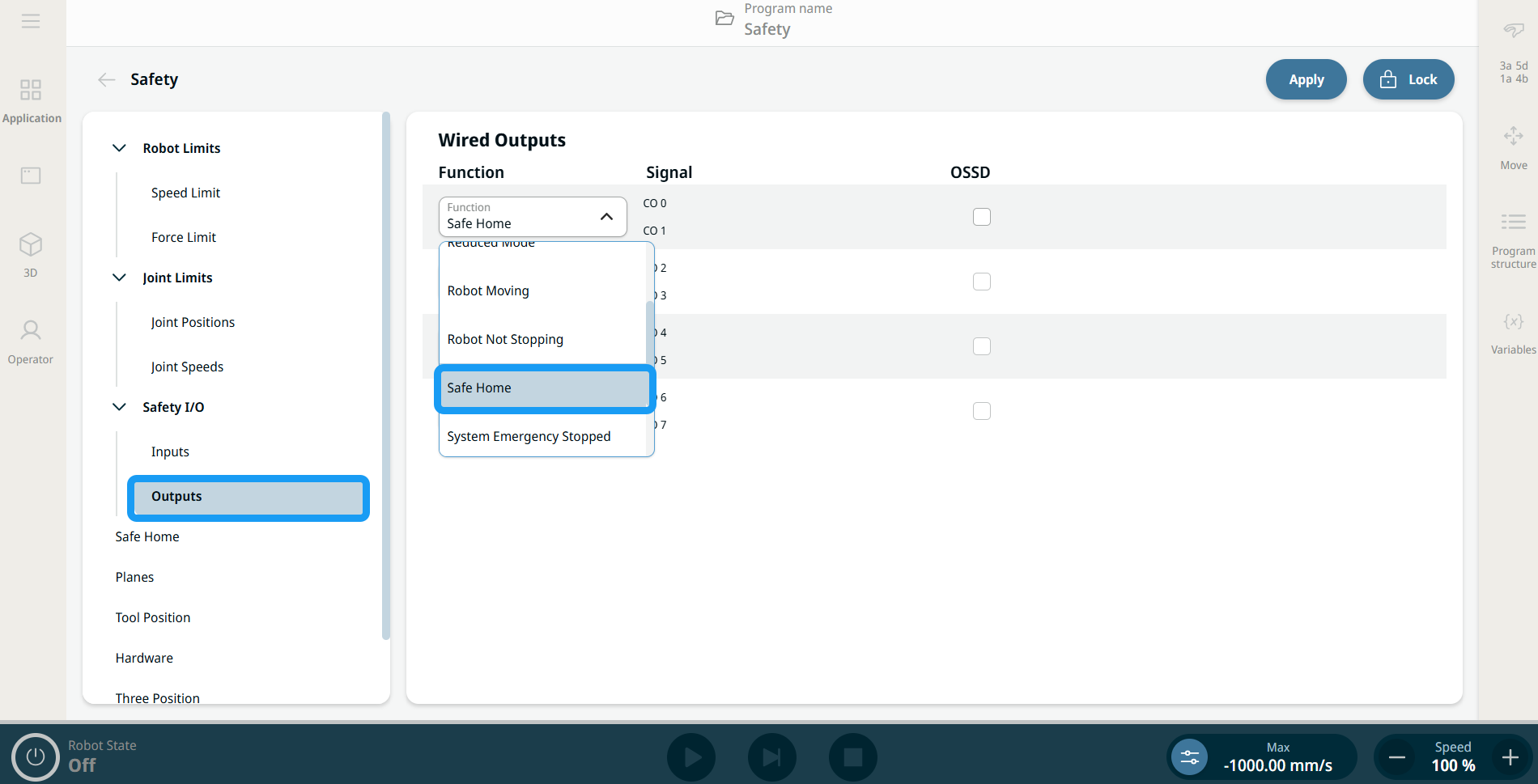
Çıkışlarda Güvenli Başlangıç işlevi |
Başlangıç pozisyonu Güvenlik bölümündeki bir pozisyon akıllı becerisine atanırsa güvenlik çıkışı işlevi açılır menüsü, yeni bir işlev ataması olarak Güvenli Başlangıç seçeneğini içerir. Güvenlik G/Ç'sinin Çıkışlar bölümündeki İşlev alanlarında Güvenli Başlangıç seçeneğini belirleyin.
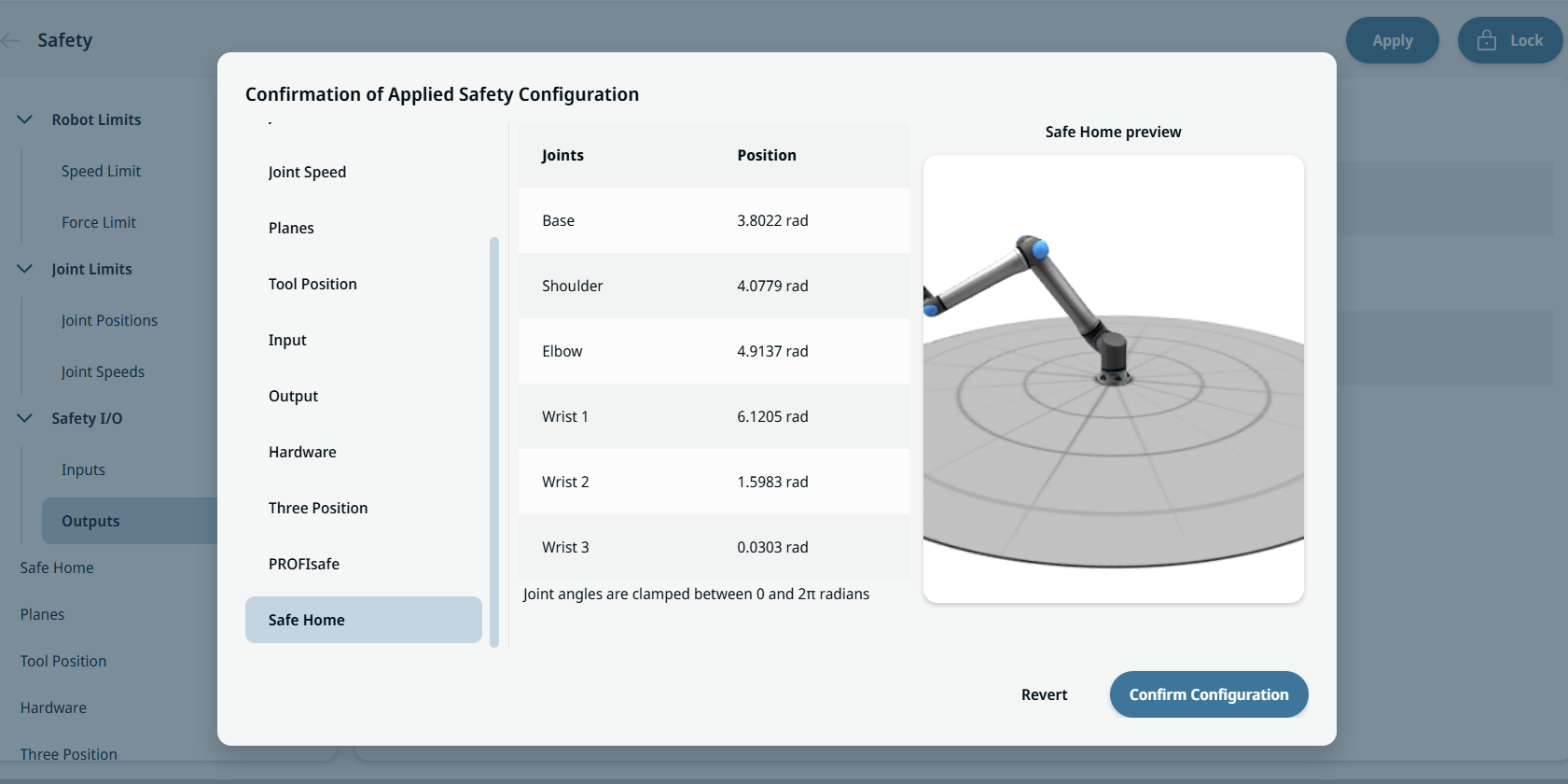
Güvenli Başlangıç, Uygulanan Güvenlik Yapılandırması Onayı özet diyaloğundaki işlev ataması tablosunda görülebilir.
|
|
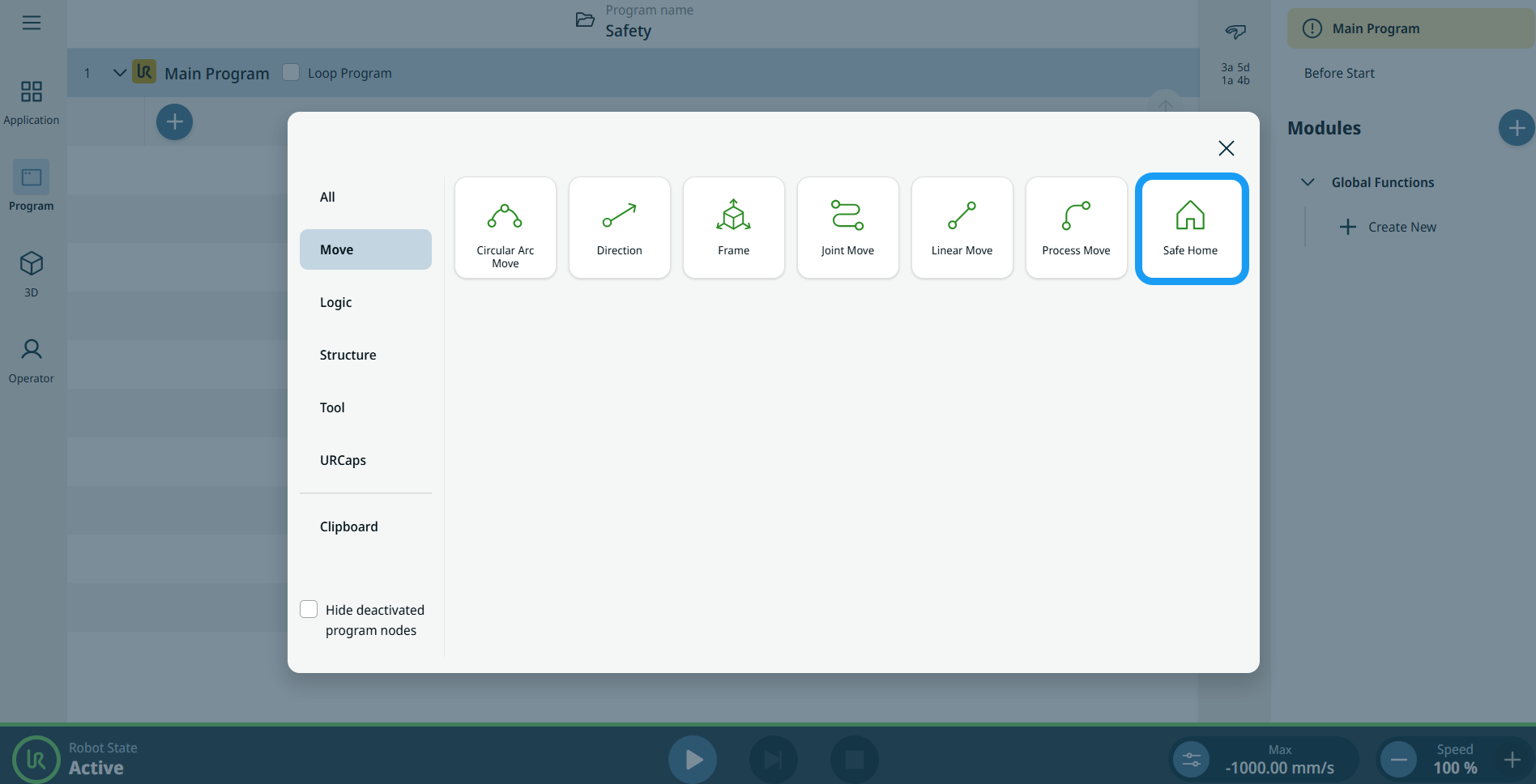
Program düğümü olarak Güvenli Başlangıç |
Güvenli Başlangıç program düğümü, Komut Düğümleri dâhilindeki Hareket düğümleri kategorisi altında yer alır. Bu düğüm, robota güvenli başlangıç için güvenli uygulama ayarlarında yapılandırılan şekilde, önceden belirlenen güvenli başlangıç pozisyonuna hareket etme komutu vermek için kullanılır.
Güvenlikte yapılandırılan bir güvenli başlangıç pozisyonu olmadan düğümü eklemek, düğümü sarı olarak işaretler.

Güvenli Başlangıç komutu düğümünde üç nokta simgesine
|
 dokunulduğunda devinim profilleri seçenekleri ve diğer gelişmiş seçenekler bulunur.
dokunulduğunda devinim profilleri seçenekleri ve diğer gelişmiş seçenekler bulunur.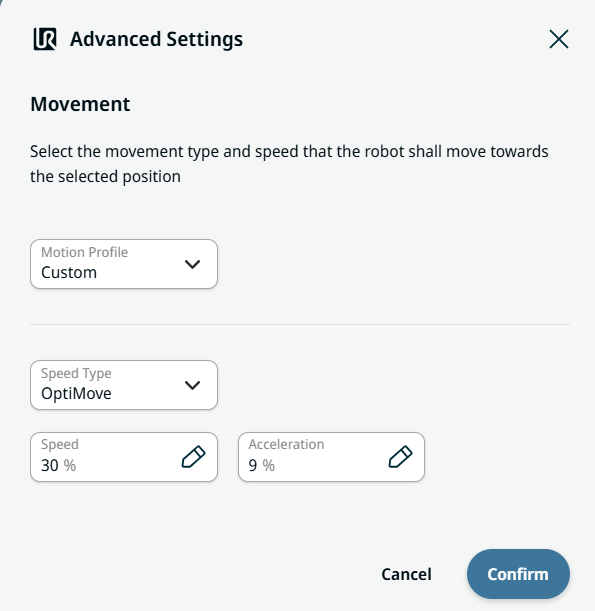
| Gelişmiş Ayarlar |
Kullanıcılar, iki sekme ve iki alanı kullanarak Gelişmiş Ayarlarda hareket profilleri oluşturabilir:
Hareket Profili, kullanıcıların hareket düğümlerinde önceden tanımlanmış devinim profilleri belirleyebilmelerini sağlayan bir özelliktir: Eklem Hareketi, Doğrusal Hareket, Dairesel Yay Hareketi, Süreç Hareketi ve Yön. Özel Devinim Profili, kullanıcıların hareket et düğümünde hareket verilerini tanımlayabilmelerini sağlar. Hız Türü alanında varsayılan seçenek OptiMove'dur. Hız ve ivmeyi saniye başına derece veya saniye başına mm cinsinden girmek istiyorsanız, Classic hareketini seçin. OptiMove ayarları, kullanım ve kurulumu sadeleştirmek için yüzde cinsinden belirtilir. Kullanıcılar, robotun maksimum hız becerisinin yüzdesi olarak hedef gidiş hızını belirleyen Hız sekmesinde tercih edilen hız yüzdesini yapılandırabilir. Kullanıcılar, robotun maksimum gücünün yüzdesi olarak hızlandırma ve yavaşlatma sırasında hedef tork limitlerini belirleyen Hızlandırma sekmesinde tercih edilen hızlandırma yüzdesini yapılandırabilir.
|