İlk Önyükleme
| Açıklama |
İlk ön yükleme, montajdan sonra robotla yapabileceğiniz ilk eylemler dizisidir. Bu başlangıç dizisi şunları yapmanızı gerektirir:
|
|
Robot kolu çalıştırmadan önce taşıma kapasitesinin ve kurulumun doğrulanmaması, personelin yaralanmasına ve/veya maddi hasara yol açabilir.
Yanlış taşıma kapasitesi ve kurulum ayarları, robot kolun ve Kontrol Kutusunun doğru çalışmasını engeller.
Robotun daha düşük sıcaklıklarda çalıştırılması, sıcaklığa bağlı yağ ve gres viskozitesi nedeniyle daha düşük performansa veya durmalara neden olabilir.
|
Robotu Açma
| Robotu açmak için |
Robotu açmak, Kontrol Kutusunu açar ve EÜ ekranındaki ekranı yükler.
|
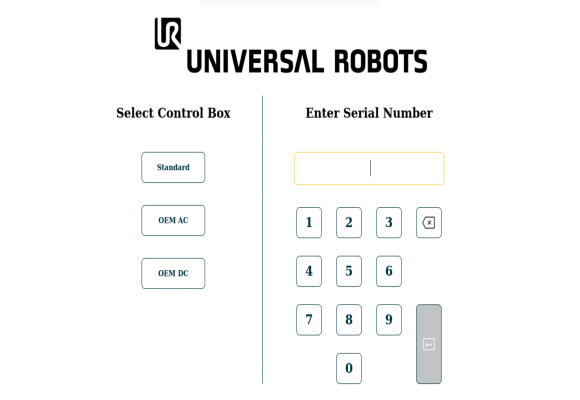
Seri Numarasının girilmesi
| Seri numarasını eklemek için |
Robotunuzu ilk kez kurmak için robot koldaki seri numarasını girmeniz gerekir. Bu prosedür, yazılımı yeniden yüklediğinizde de gereklidir. Örneğin, bir yazılım güncellemesi yüklediğinizde. |
|
|
Başlangıç ekranının yüklenmesi birkaç dakika sürebilir.
|
Robot Kolu Başlatma
| Robotu çalıştırmak için |
Robot kolun çalıştırılması, fren sistemini devre dışı bırakarak robot kolu hareket ettirmeye ve PolyScope X'i kullanmaya başlamanızı sağlar.
|


Robot kol durumu Boşta durumundan Normal durumuna geçtiğinde sensör verileri robot kolunun yapılandırılmış montajına karşı kontrol edilir. Montaj doğrulanırsa tüm eklem frenlerini serbest bırakmaya devam etmek ve robot kolu çalışmaya hazırlamak için BAŞLAT seçeneğine dokunun.
|

Robotu Kapatma
| Robot kolun gücünü kapatmak için |
Beklenmedik bir şekilde çalışmaya başlama ve/veya hareket etme, yaralanmalara neden olabilir.
Artık şunları yapabilirsiniz:
|