Limity robota
| Opis |
Limity robota ograniczają ogólne ruchy robota.
Limity bezpieczeństwa ograniczają siły i ruchy na kołnierzu narzędzia i pośrodku dwóch zdefiniowanych przez użytkownika pozycji narzędzia
|
| Limity prędkości | 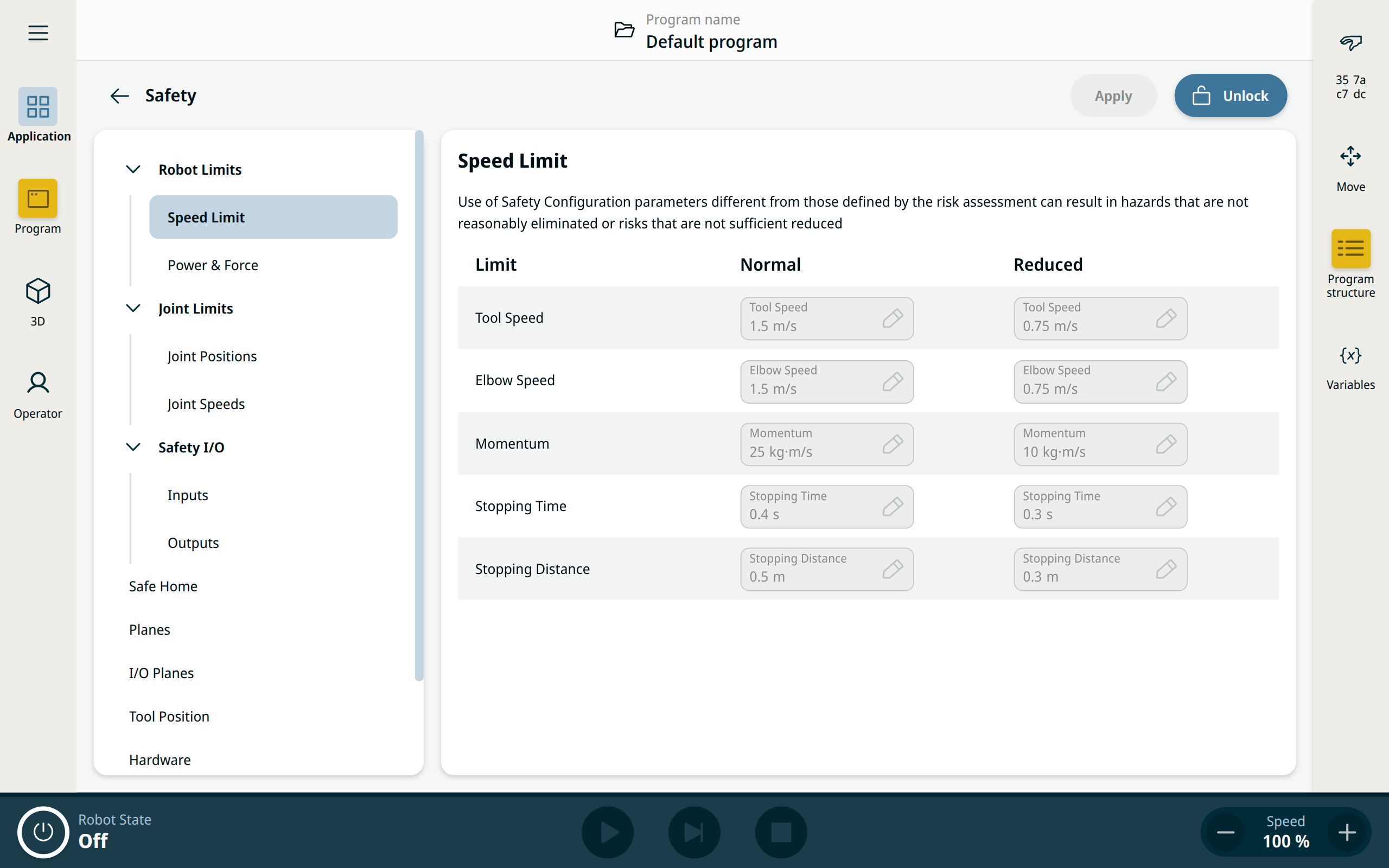
Ograniczenie czasu i odległości zatrzymania wpływa na ogólną prędkość robota. Na przykład, jeśli czas zatrzymania jest ustawiony na 300 ms, maksymalna prędkość robota jest ograniczona, co pozwala robotowi zatrzymać się w ciągu 300 ms.
|
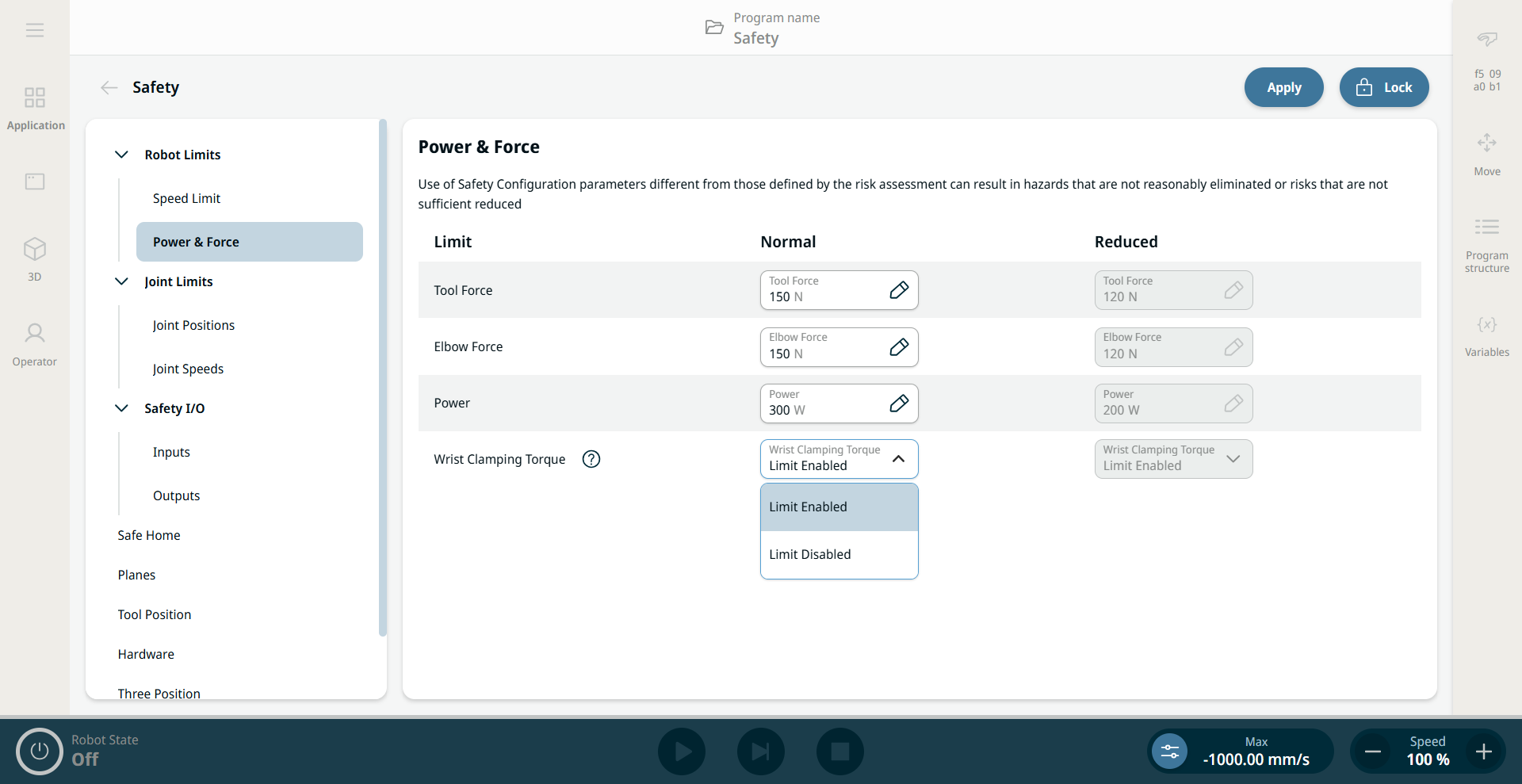
| Moc i siła |
Siły działające na narzędzie i łokieć mogą zostać przekroczone przez trzy przeguby nadgarstka, jeśli funkcja bezpieczeństwa „momentu obrotowego zaciskania nadgarstka” jest wyłączona
|