Płaszczyzny we/wy
| Opis |
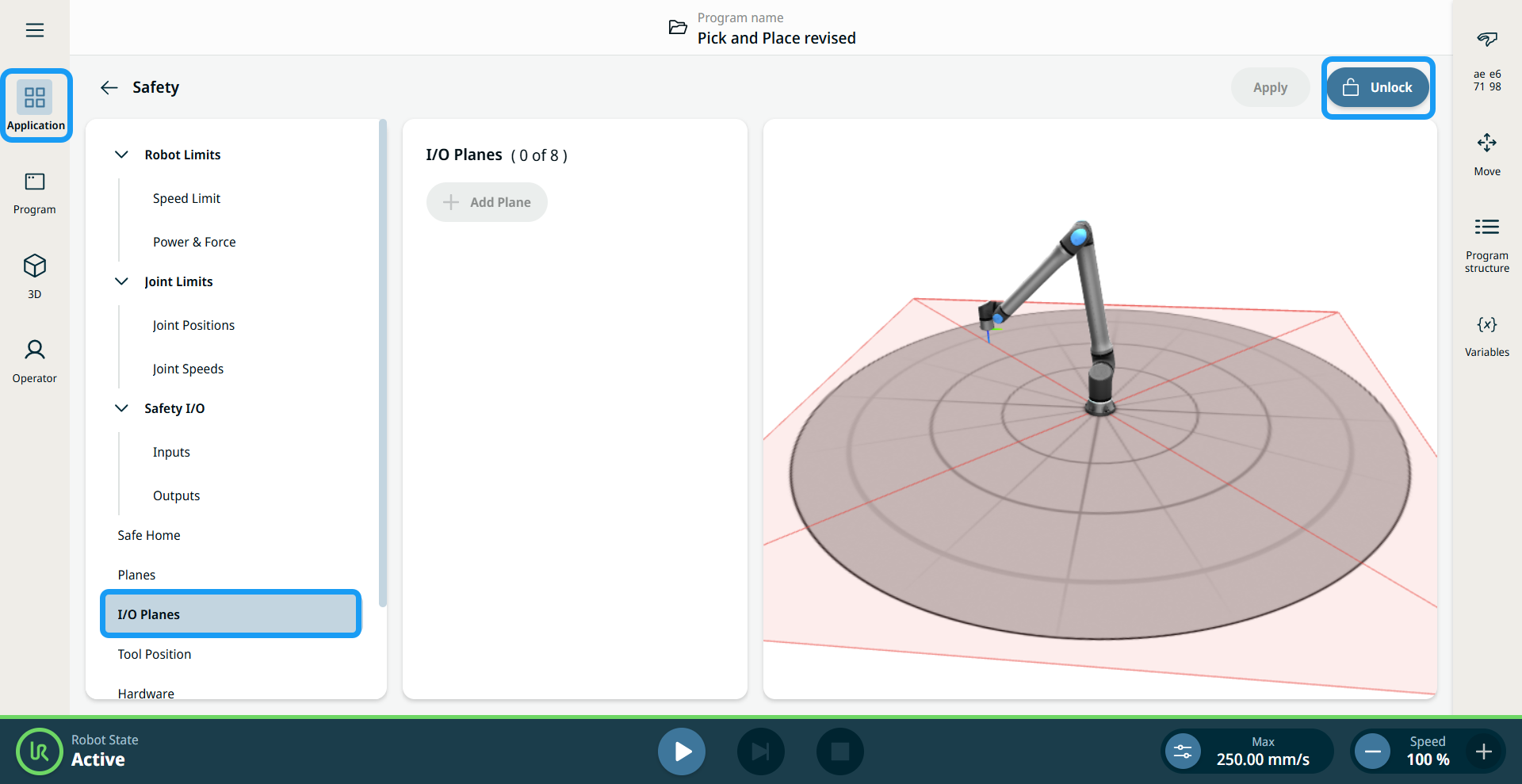
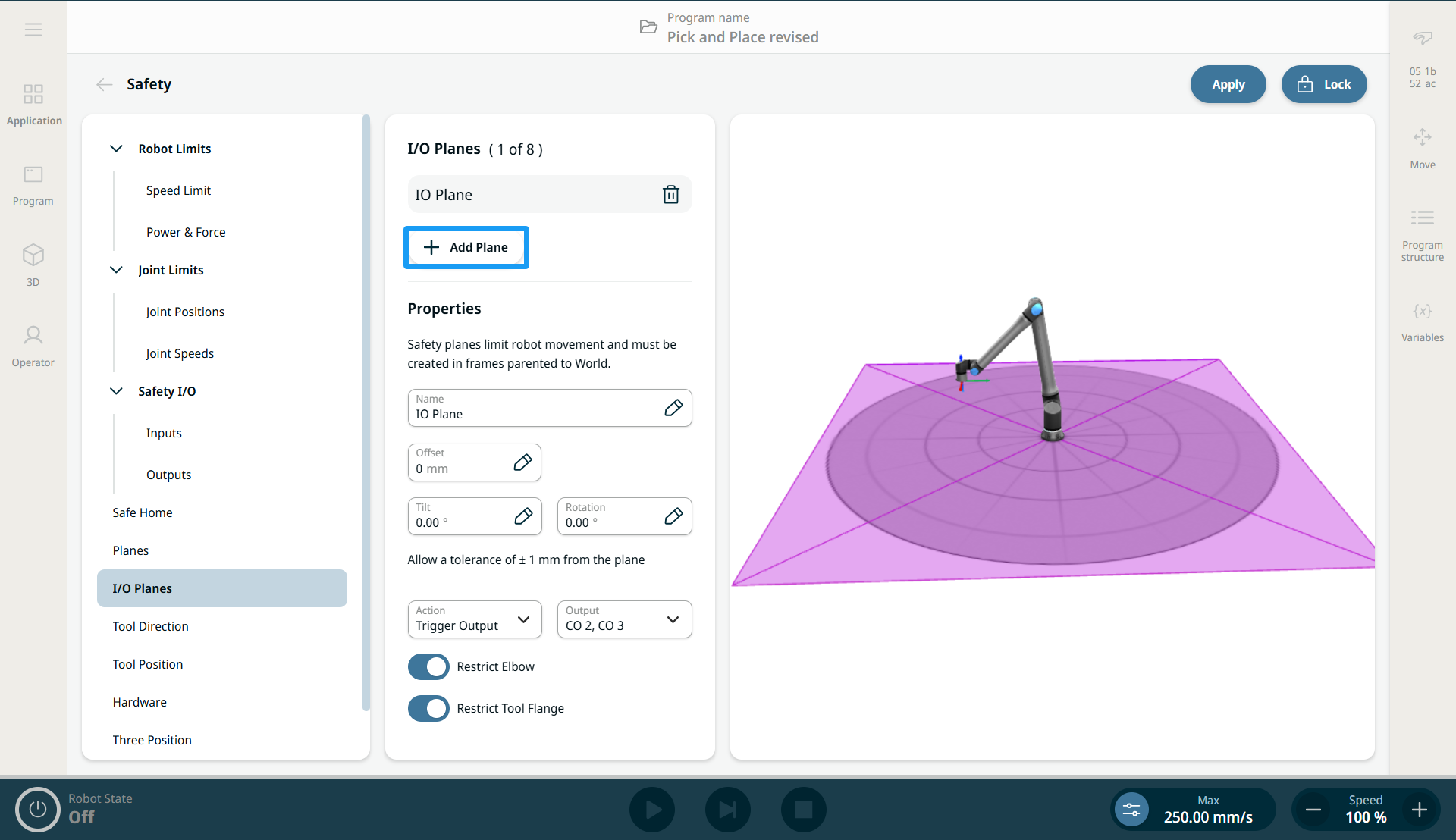
Funkcja I/O Planes zapewnia bardziej elastyczne korzystanie z płaszczyzn bezpieczeństwa w porównaniu ze standardowymi płaszczyznami bezpieczeństwa. Safety Planes funkcjonalność. Umożliwia aktywację i dezaktywację płaszczyzn bezpieczeństwa za pomocą wejść terminala i/lub generowanie sygnału wyjściowego, gdy kule bezpieczeństwa przekroczą płaszczyznę bezpieczeństwa.
|
|
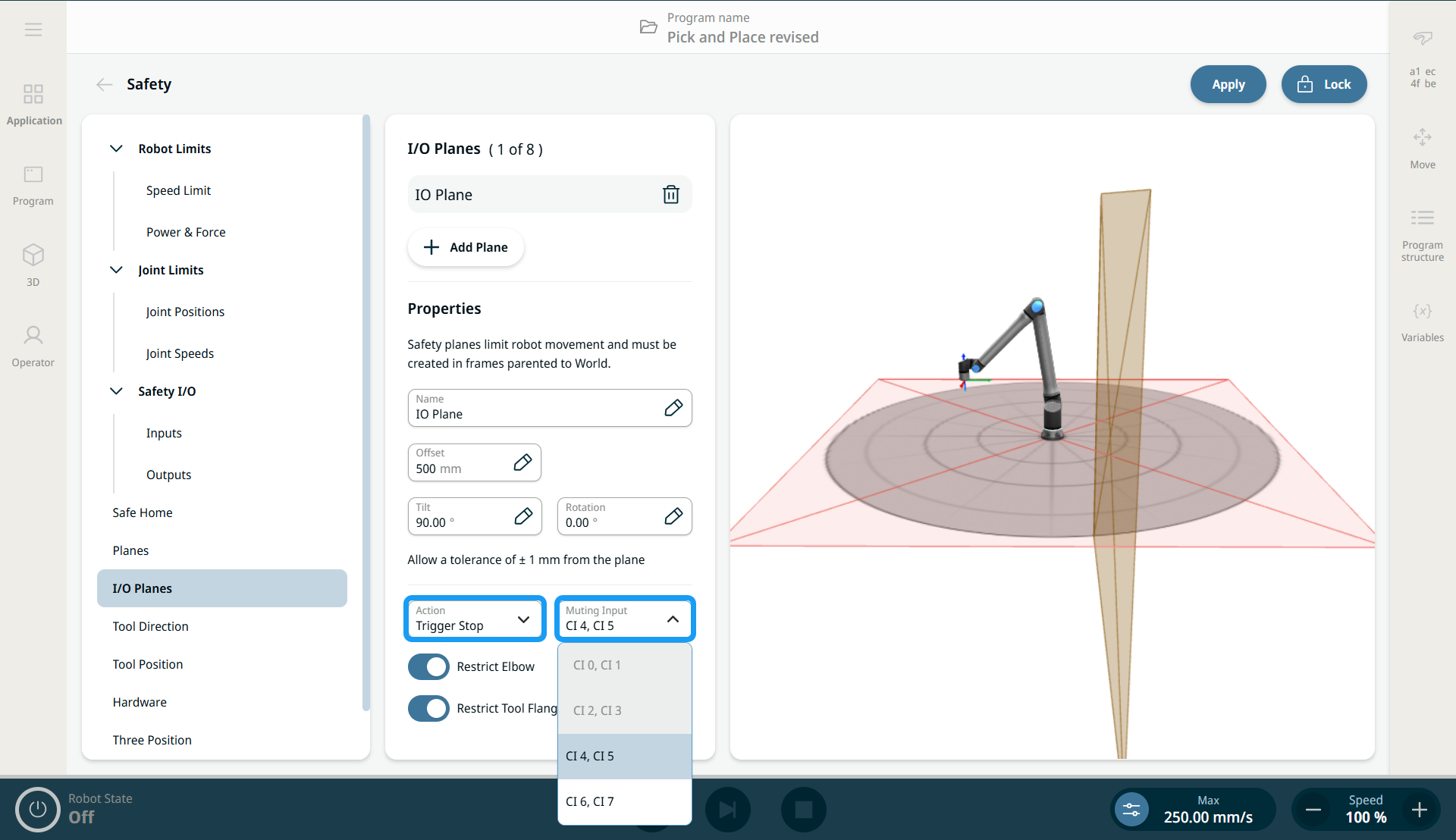
Płaszczyzna wejścia/zatrzymania |
Trigger Stop wyzwala zatrzymanie płaszczyzny we/wy. Można go wyciszyć za pomocą wejścia bezpieczeństwa. O ile nie zostanie wyciszony, poruszanie się w kierunku samolotu powoduje zatrzymanie robota i oczekiwanie, aż wejście bezpieczeństwa wyciszy samolot. Gdy płaszczyzna jest nieaktywna, robot może poruszać się swobodnie. Gdy płaszczyzna jest aktywna, a robot nie przekroczył jej, zatrzyma się przed jej przekroczeniem. Jeśli płaszczyzna zostanie aktywowana, podczas gdy robot porusza się na krawędzi płaszczyzny, robot może przekroczyć płaszczyznę i w najgorszym przypadku zatrzyma się zgodnie ze skonfigurowanymi limitami odległości i czasu zatrzymania. Gdy płaszczyzna zostanie aktywowana, a robot przekroczy płaszczyznę, robot zatrzyma się zgodnie ze skonfigurowaną odległością zatrzymania i limitami czasu zatrzymania.
|
|
|
|
|
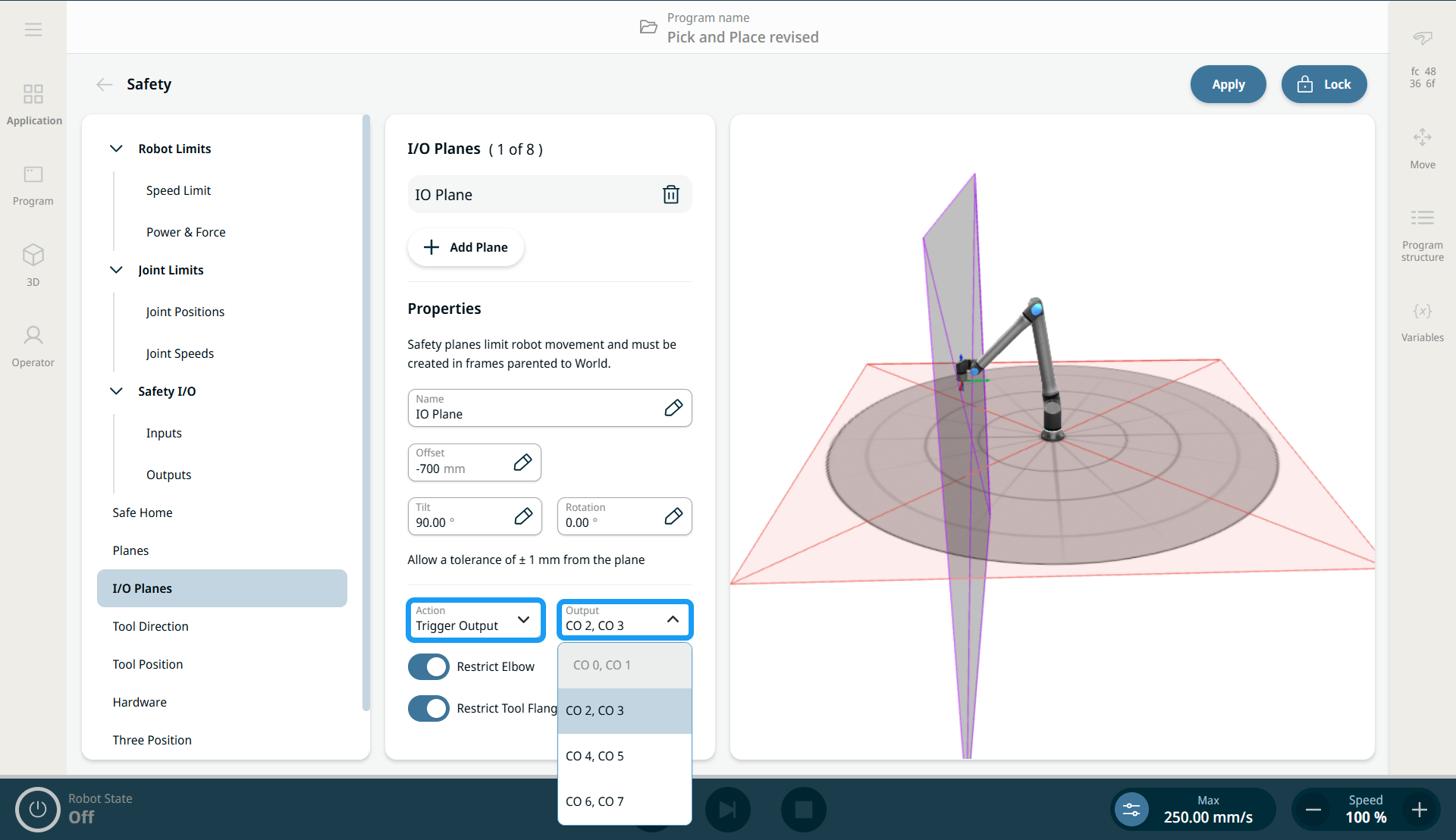
Płaszczyzna wyjściowa |
Trigger Output generuje wyjście bezpieczeństwa w oparciu o to, czy jedna lub więcej sfer bezpieczeństwa przekroczyła płaszczyznę. Gdy jedna lub więcej kul bezpieczeństwa przekroczy płaszczyznę zdefiniowaną jako wyjście wyzwalające, aktywowane jest wyjście bezpieczeństwa odpowiadające tej płaszczyźnie. "Aktywowany" oznacza, że wyjścia bezpieczeństwa są elektrycznie ustawione na "Niski". Gdy którakolwiek z kul bezpieczeństwa przekroczy płaszczyznę zdefiniowaną jako wyjście wyzwalające, aktywowane jest wyjście bezpieczeństwa odpowiadające tej płaszczyźnie.
|