Limit momentu obrotowego zaciskania nadgarstka
| Opis |
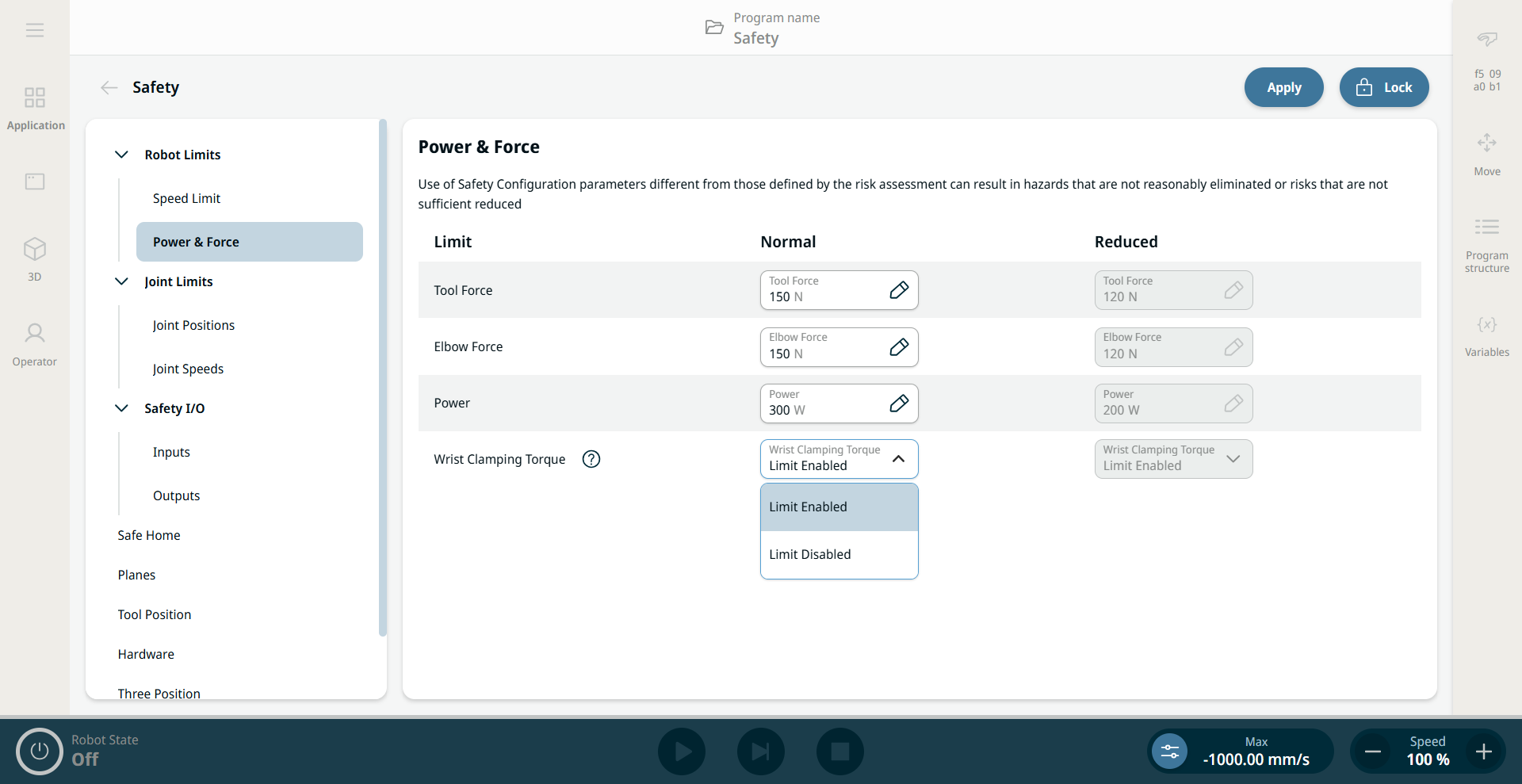
Limit momentu obrotowego zaciskania nadgarstka to ustawienie, które włącza lub wyłącza ograniczenie maksymalnego momentu zaciskania przegubów nadgarstka robota. Ograniczenie to jest domyślnie włączone. Ta funkcja bezpieczeństwa ogranicza moment obrotowy, jaki nadgarstek może przyłożyć podczas pchania.
|
|
Szczegóły limitu momentu obrotowego zaciskania nadgarstka |
Gdy jest włączona, robot ogranicza moment obrotowy w przegubach nadgarstka, aby zapobiec zaciśnięciu między nadgarstkiem, obciążeniem i dolnym ramieniem robota. Gdy to ustawienie jest włączone, definiuje również górny limit bez oceny bezpieczeństwa dla okien przyłożonego momentu obrotowego przegubów podstawy, barku i łokcia. W aplikacjach sterowania siłą osiągalne siły kontaktowe mogą być znacznie niższe niż siły określone w funkcjach bezpieczeństwa Limit siły narzędzia i Limit siły łokcia.
Gdy jest wyłączona, robot może używać większej siły pchania za pomocą przegubów nadgarstka, np. w aplikacjach sterowanych siłą. Gdy funkcja jest wyłączona, ryzyko zaciśnięcia między nadgarstkiem, obciążeniem i dolnym ramieniem robota musi być ograniczane w inny sposób. Ta funkcja bezpieczeństwa jest domyślnie włączona na wszystkich robotach. W wersji PolyScope X 10.12 i nowszych możliwe jest wyłączenie tej funkcji bezpieczeństwa.
|
|
Włączanie i wyłączanie limitu momentu obrotowego zaciskania nadgarstka |
|