I/O síkok
| Leírás |
Az I/O síkok funkció a biztonsági síkok rugalmasabb használatát biztosítja a szabványoshoz képest. Biztonsági síkok funkcióhoz képest. Lehetővé teszi a biztonsági síkok aktiválását és deaktiválását terminálbemenetek segítségével, és/vagy kimeneti jelet generál, amikor a biztonsági gömbök áthaladnak egy biztonsági síkon.
|
|
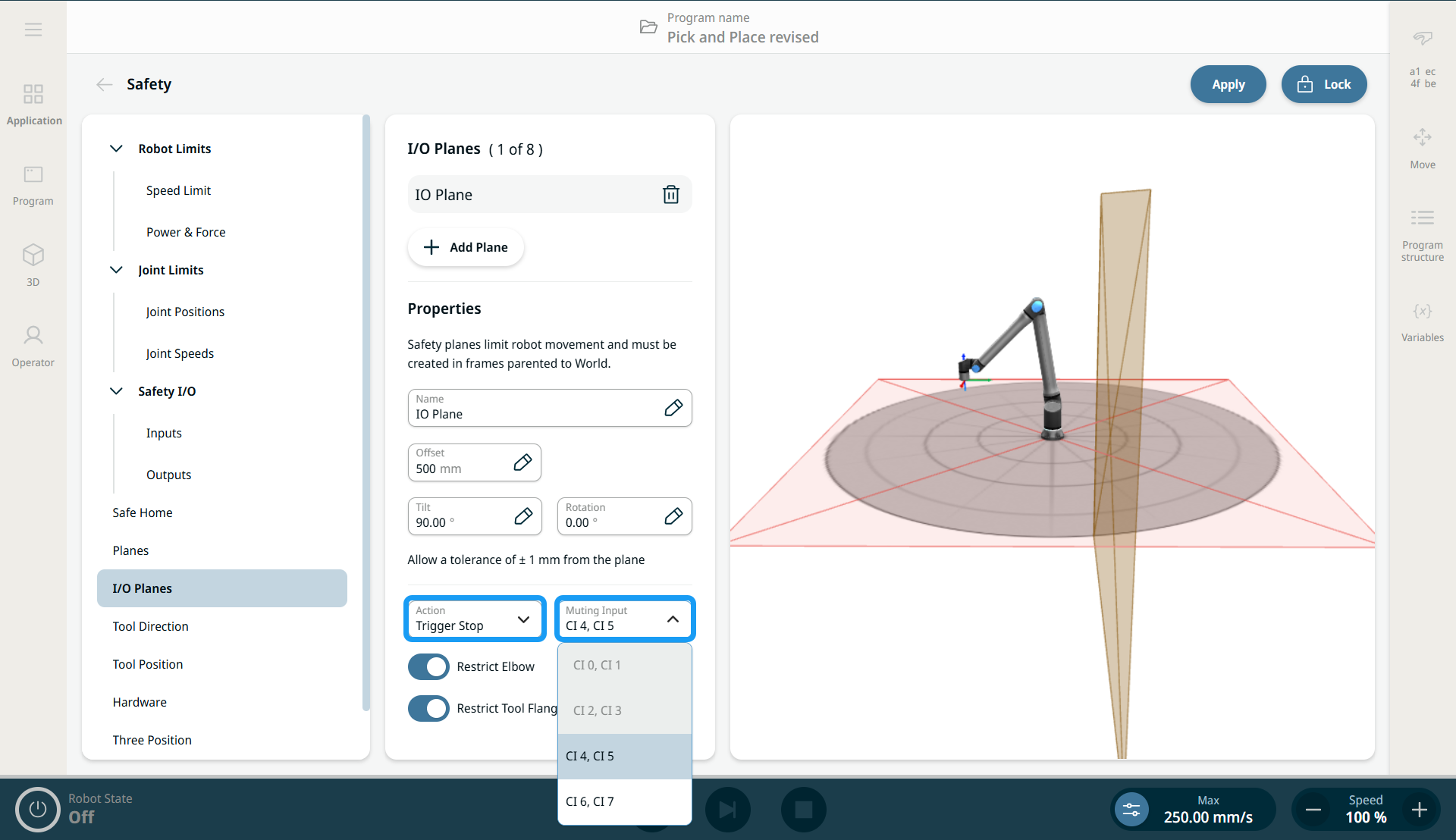
Bemeneti/leállítási sík |
A Trigger Stop egy I/O sík leállását váltja ki. Egy biztonsági bemenet segítségével elnémítható. Hacsak nem némítják el, a robot a repülőgép felé történő mozgás hatására megáll, és megvárja, amíg a biztonsági bemenet elnémítja a repülőgépet. Amikor a sík inaktív, a robot szabadon mozoghat. Ha a sík aktív, és a robot még nem lépte át a síkot, a robot megáll a sík átlépése előtt. Ha a sík aktiválódik, miközben a robot a sík szélén mozog, a robot a végén keresztezheti a síkot, és legrosszabb esetben a konfigurált távolság- és megállási időkorlátoknak megfelelően megáll. Amikor a sík aktiválódik, és a robot áthaladt a síkon, a robot a beállított megállási távolság és megállási idő határoknak megfelelően megáll.
|
|
|
|
|
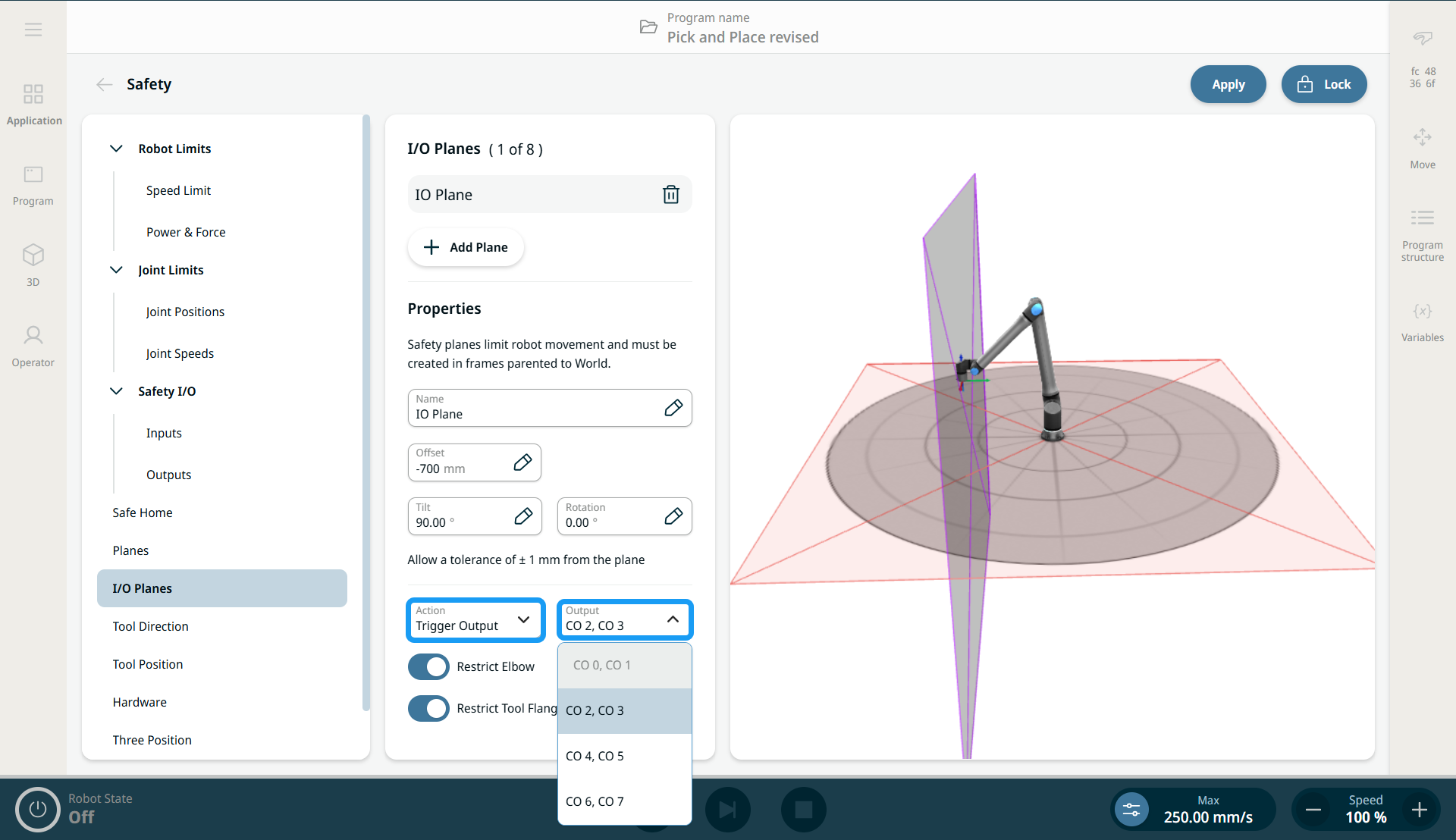
Kimeneti sík |
A Trigger Output biztonsági kimenetet generál annak alapján, hogy egy vagy több biztonsági gömb átlépte-e a síkot. Ha egy vagy több biztonsági gömb átlépte a trigger kimenetként meghatározott síkot, akkor az adott síknak megfelelő biztonsági kimenet aktiválódik. "Aktiválva" azt jelenti, hogy a biztonsági kimenetek elektromosan "alacsony" értékre vannak állítva. Amikor a biztonsági gömbök bármelyike átlépi a kiváltó kimenetként meghatározott síkot, az adott síknak megfelelő biztonsági kimenet aktiválódik.
|