Déplacement linéaire
| Description |
The Linear Move command node supports Motions Profiles as Joint Move, but it creates a movement that is a direct line from point A and point B. It moves the Tool Center Point (TCP) linearly between waypoints. Cela signifie que chaque articulation effectue un mouvement plus compliqué pour maintenir l'outil sur une trajectoire en ligne droite.
|
|
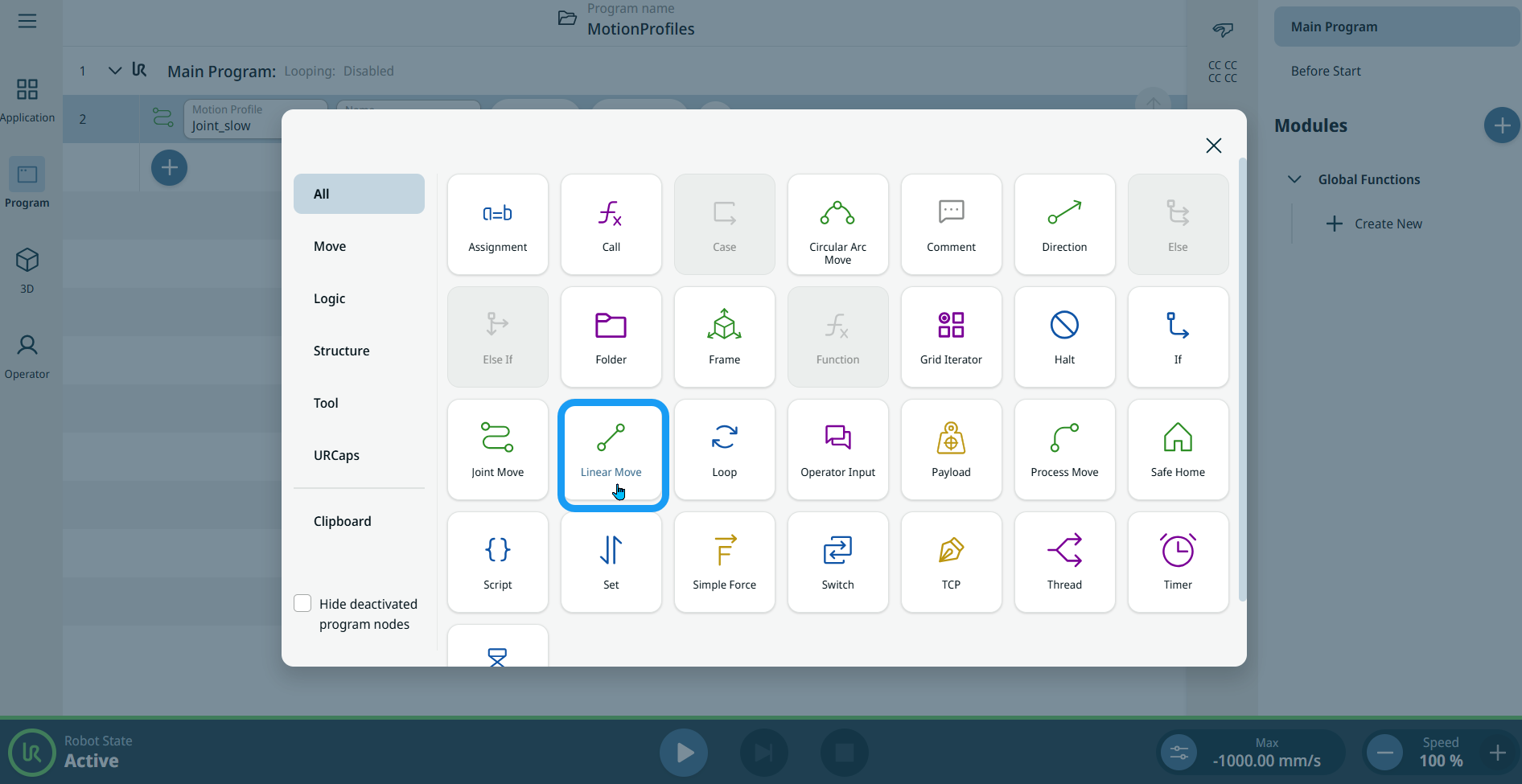
To access Linear Move command |
|
|
|
|
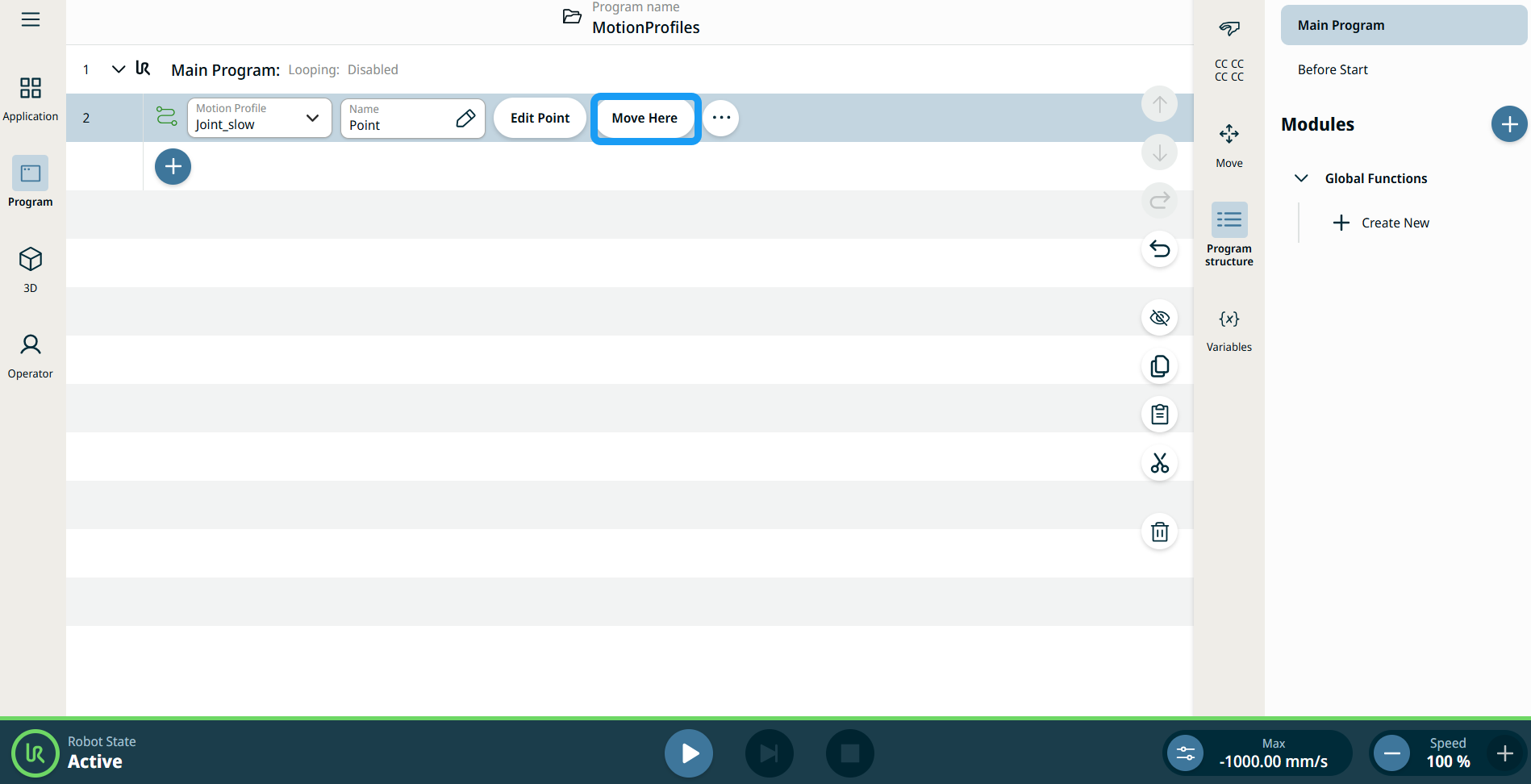
| Utilisation du bouton Déplacer ici |
Le bouton Déplacer ici est visible dans les commandes Déplacement linéaire et Déplacement articulaire. Cette fonction vous permet de passer directement à la position d'un point de passage depuis l'arborescence du programme. Appuyer sur le bouton Déplacer ici ouvre la boîte de dialogue Déplacer le robot dans la position. Le bouton est visible lorsque le point de passage a été enseigné et n'est activé que lorsque l'état du robot est en mode Normal ou Réduit.
|
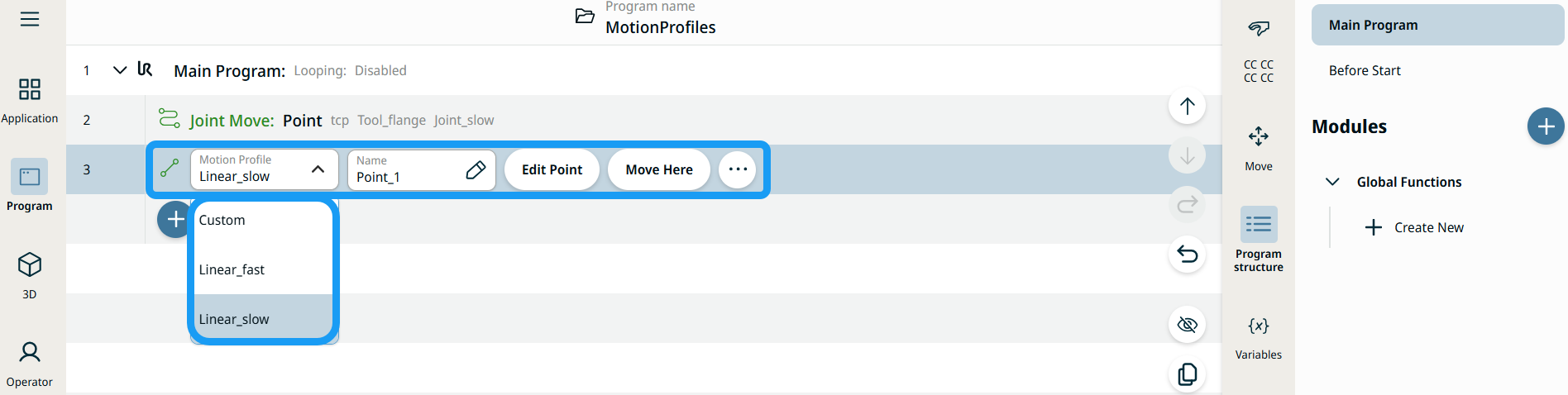
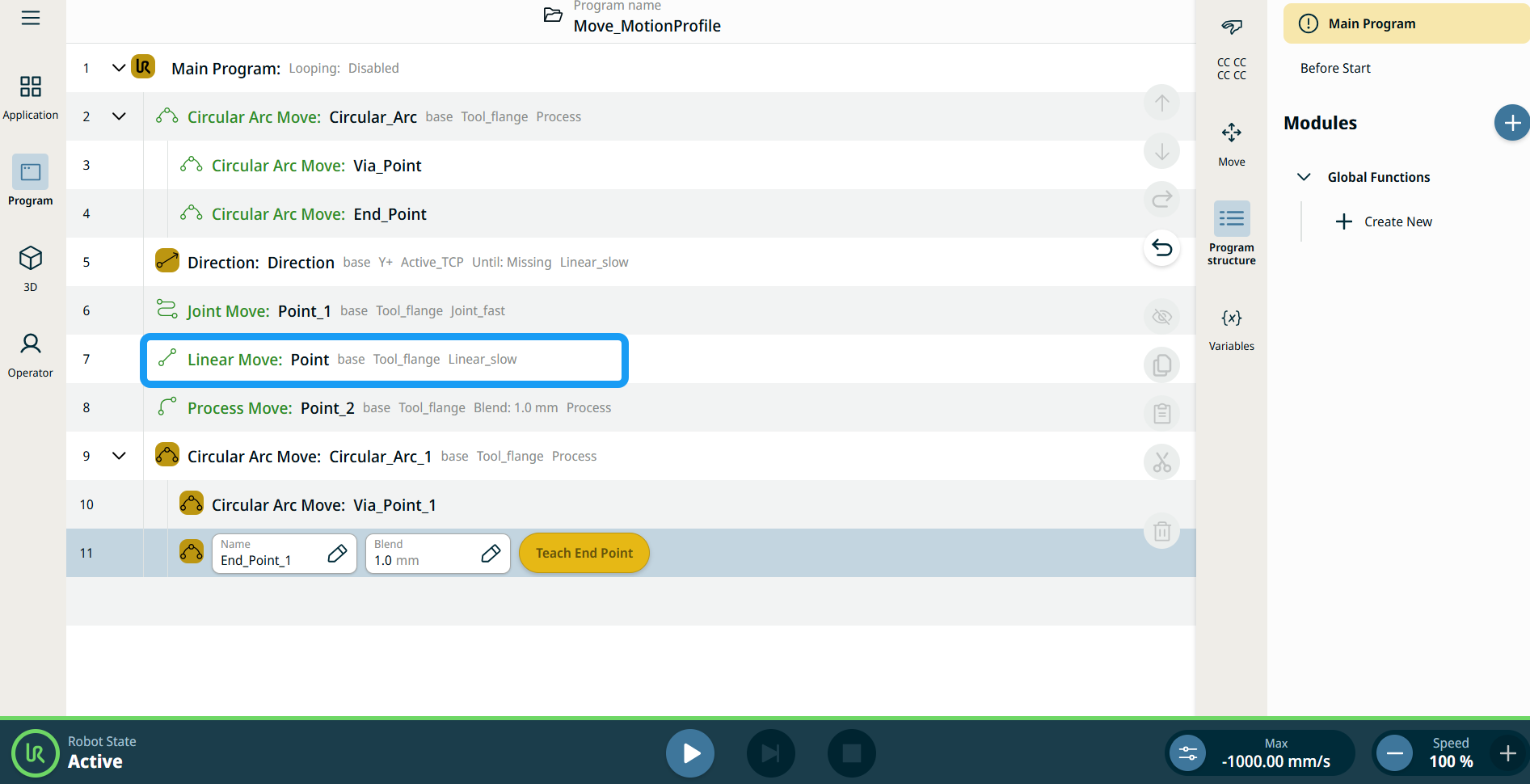
| Étiquettes du profil de mouvement sur les nœuds de déplacement |
Tous les nœuds de commandes liés au mouvement dans l'arborescence du programme affichent le profil de mouvement associé à chaque nœud. Cette fonction permet aux utilisateurs de voir le profil de mouvement sélectionné sur un nœud de déplacement. Cette fonctionnalité est implémentée sur les nœuds de commande suivants : Les nœuds de mouvement avec le profil de mouvement personnalisé affichera les valeurs de la vitesse et de l'accélération au lieu du profil de mouvement. |
|
|
|
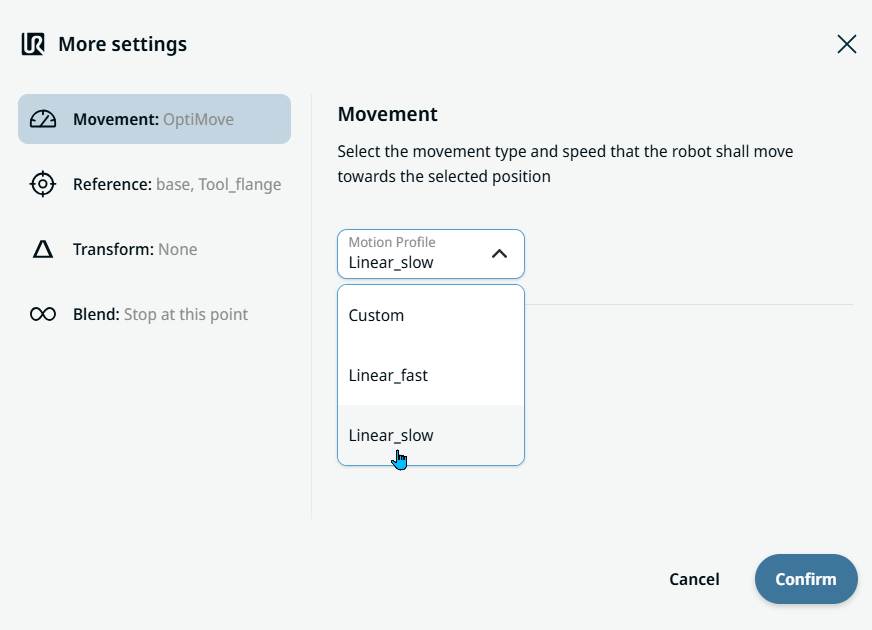
| Movement setting |
|
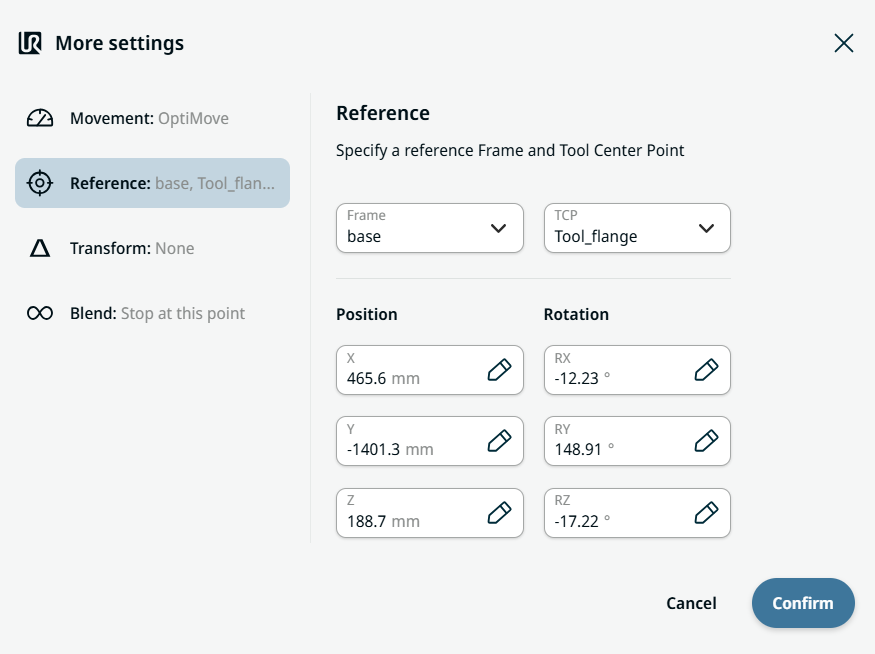
| Reference setting |
|
| Transform setting |
|
|
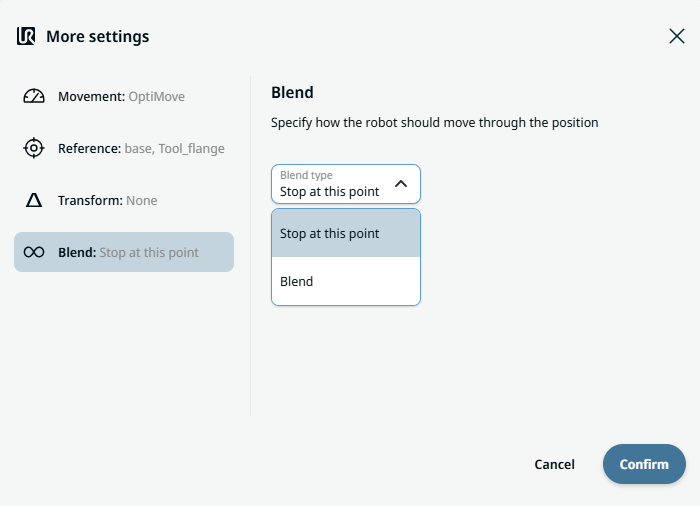
Blend setting |
|