Déplacement Circulaire
| Description |
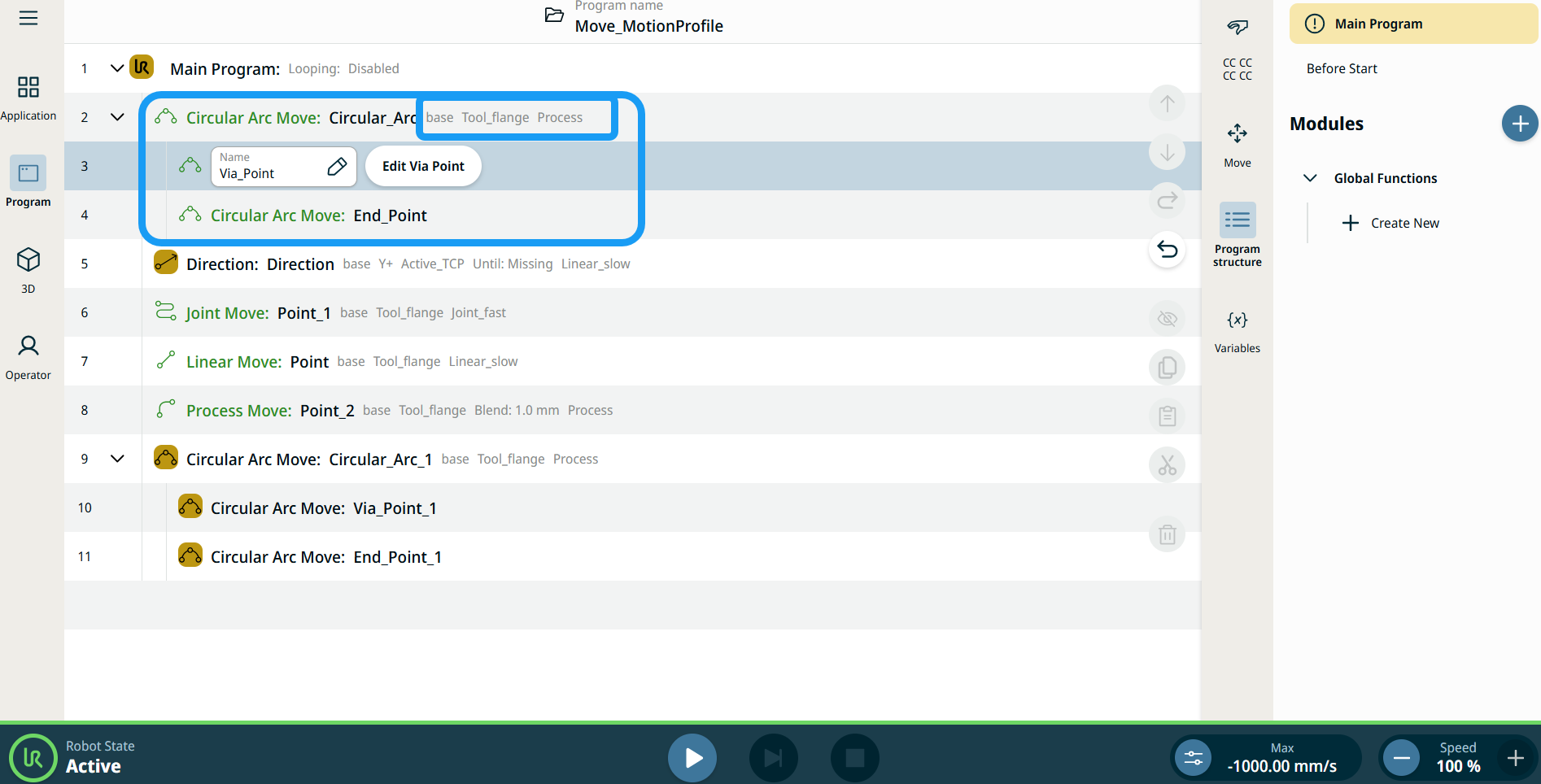
The Circular Arc Move enables you to program the robot to move in a circular motion while keeping the tool orientation either fixed or unconstrained.
|
|
To access Circular Arc Move command |
|
|
The three editable fields are:
|


| Étiquettes du profil de mouvement sur les nœuds de déplacement |
Tous les nœuds de commandes liés au mouvement dans l'arborescence du programme affichent le profil de mouvement associé à chaque nœud. Cette fonction permet aux utilisateurs de voir le profil de mouvement sélectionné sur un nœud de déplacement. Cette fonctionnalité est implémentée sur les nœuds de commande suivants : Les nœuds de mouvement avec le profil de mouvement personnalisé affichera les valeurs de la vitesse et de l'accélération au lieu du profil de mouvement. |
|
|
|
| To access More settings |
Tap the More button, and the More settings screen appears. On the left side, you see four advanced options:
|

|
To use Orientation |
|

|
To use Movement |
|
 Two fields appear:
Two fields appear:|
To use Reference |
|

|
To use Transform |
|
|
To use Circular Arc Move: Via_point |
|

|
To use Circular Arc Move: End_Point |
|
