Déplacement articulaire
| Description |
The Joint Move is a move command node that supports Motion Profiles. The command creates a movement from point A to point B that is optimal for the robot. Le mouvement peut ne pas être une ligne directe entre A et B, mais être optimal pour la position de départ et la position finale des articulations. Déplacer articulation crée des déplacements qui sont calculés dans l'espace d'articulation du bras du robot. Les articulations sont commandées pour achever leurs déplacements en même temps. Ce type de déplacement a pour résultat que l'outil suit une trajectoire courbe.
|
|
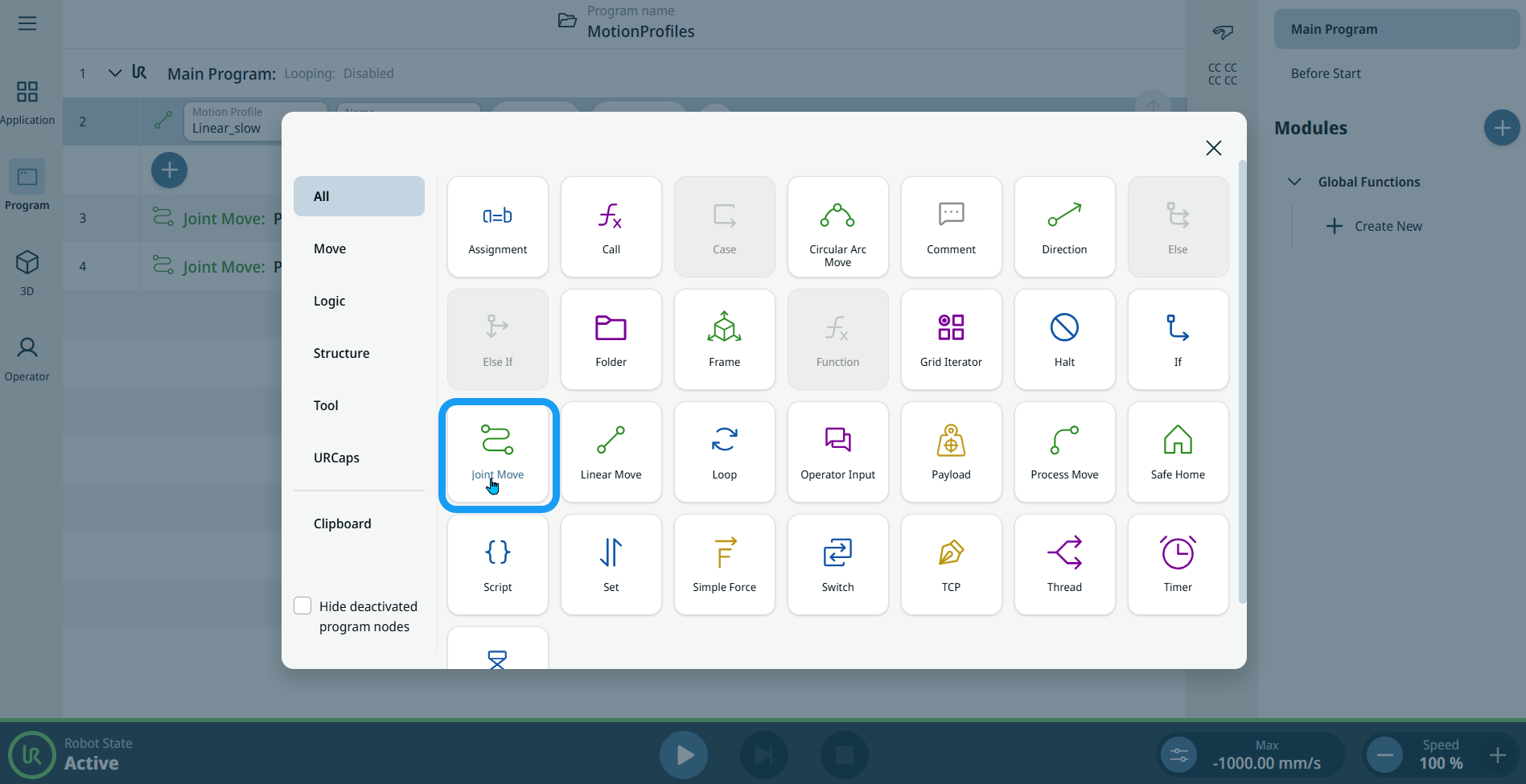
To access Joint Move command |
|
|
|
|
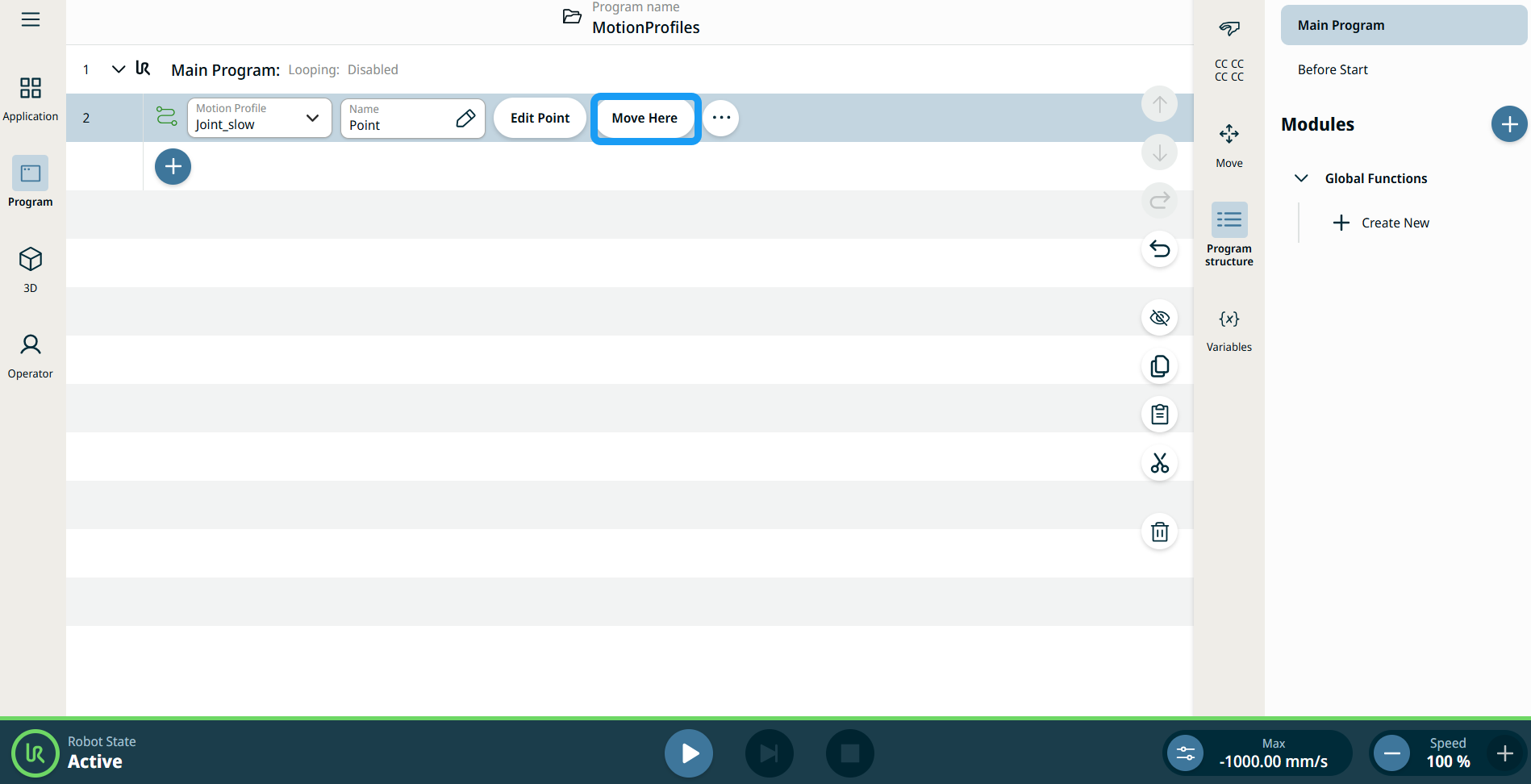
| Étiquettes du profil de mouvement sur les nœuds de déplacement |
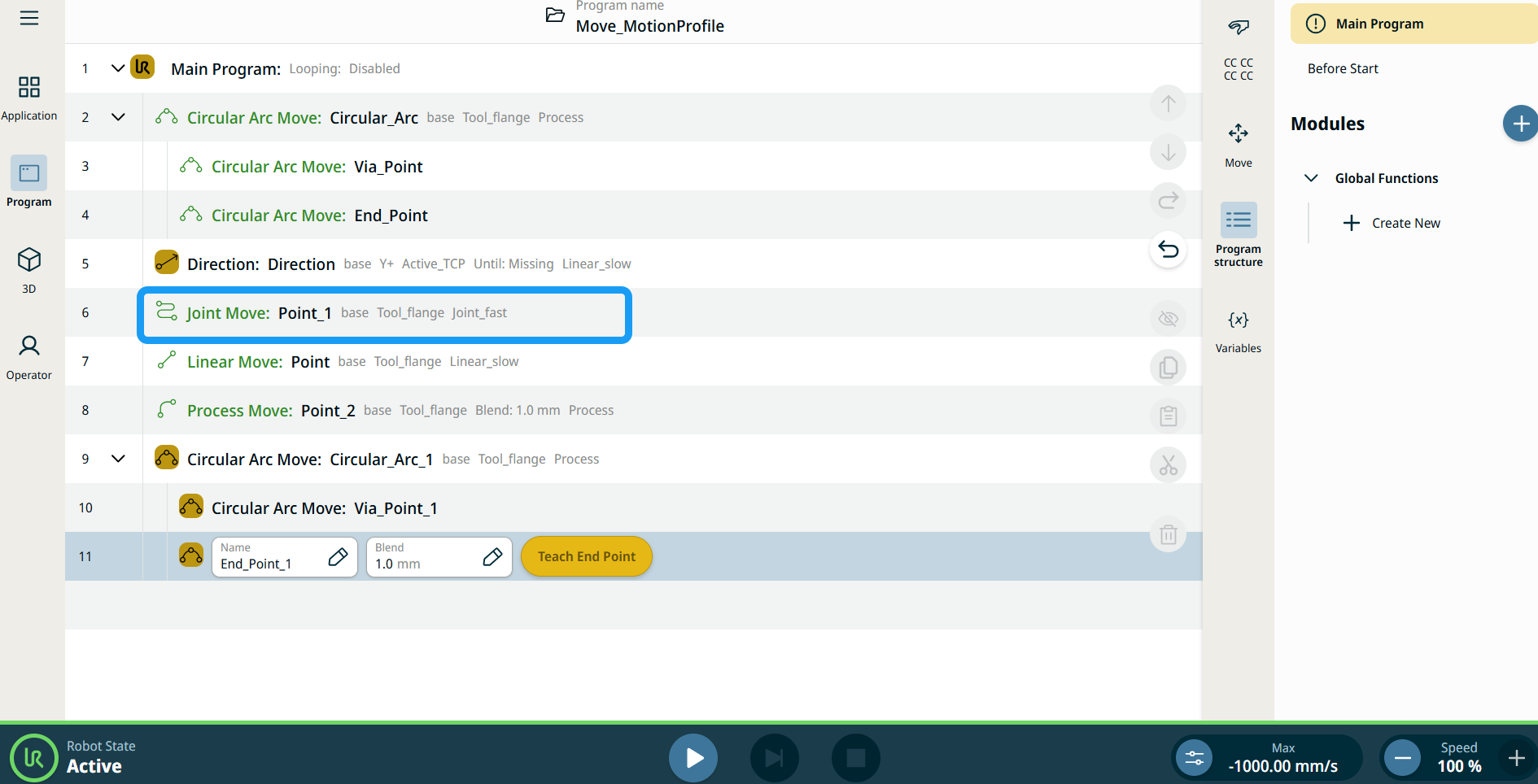
Tous les nœuds de commandes liés au mouvement dans l'arborescence du programme affichent le profil de mouvement associé à chaque nœud. Cette fonction permet aux utilisateurs de voir le profil de mouvement sélectionné sur un nœud de déplacement. Cette fonctionnalité est implémentée sur les nœuds de commande suivants : Les nœuds de mouvement avec le profil de mouvement personnalisé affichera les valeurs de la vitesse et de l'accélération au lieu du profil de mouvement. |
|
|
|
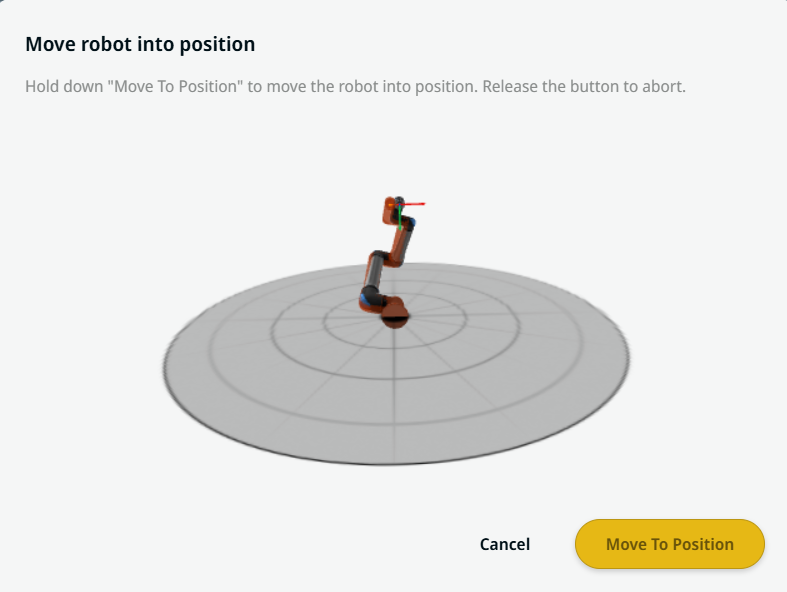
| Utilisation du bouton Déplacer ici |
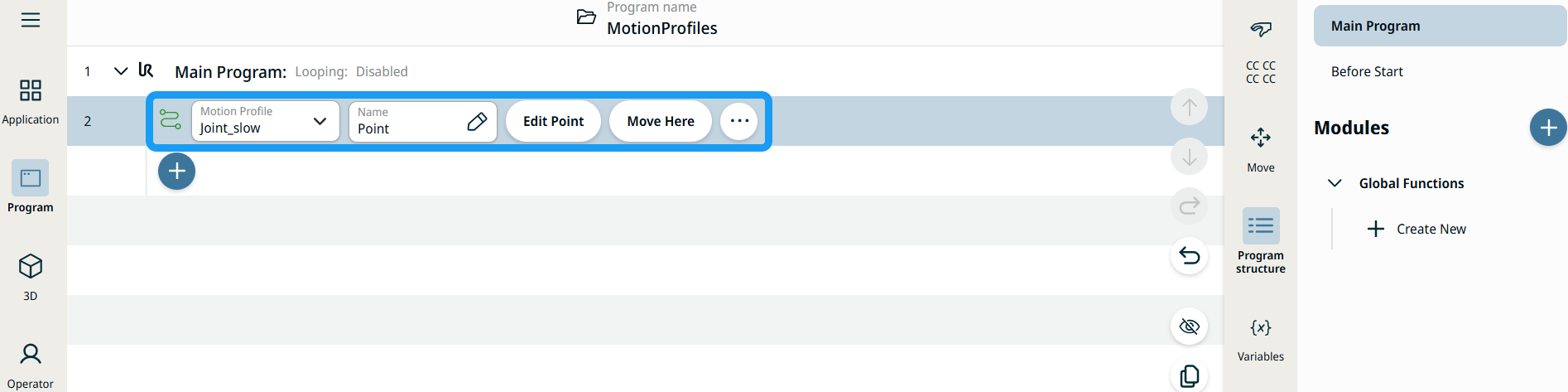
Le bouton Déplacer ici est visible dans les commandes Déplacement linéaire et Déplacement articulaire. Cette fonction vous permet de passer directement à la position d'un point de passage depuis l'arborescence du programme. Appuyer sur le bouton Déplacer ici ouvre la boîte de dialogue Déplacer le robot dans la position. Le bouton est visible lorsque le point de passage a été enseigné et n'est activé que lorsque l'état du robot est en mode Normal ou Réduit.
|
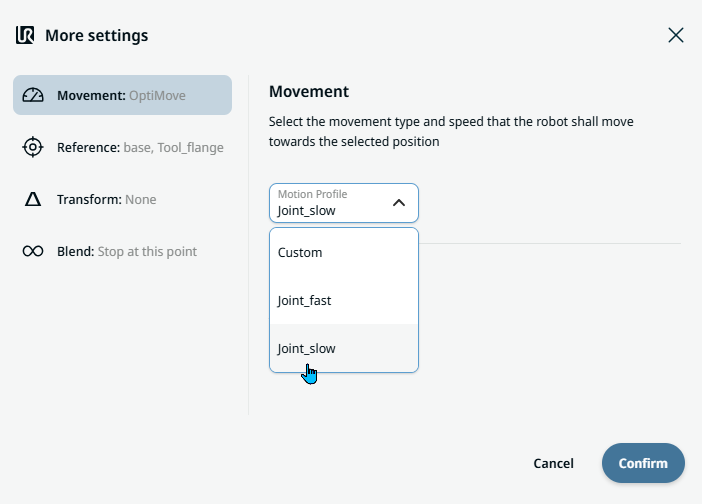
| Movement setting |
|
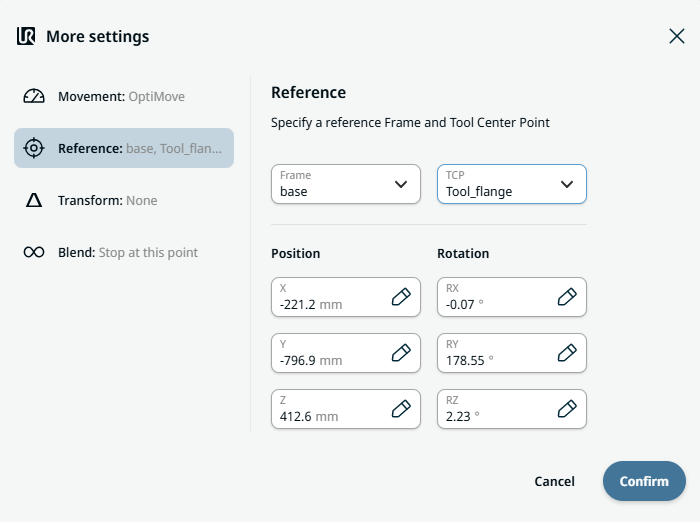
| Reference setting |
|
| Transform setting |
|
|
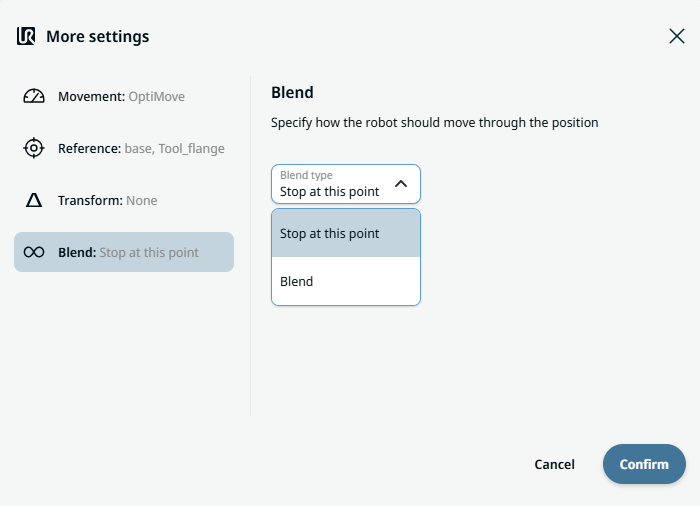
Blend setting |
|