PROFIsafe
| Description |
Le protocole réseau PROFIsafe (implémenté dans sa version 2.6.1) permet au robot de communiquer avec un automate de sécurité conformément aux exigences de la norme ISO 13849, Cat 3 PLd. Le robot transmet des informations relatives à la sécurité à un automate de sécurité et reçoit des informations relatives à la sécurité. Les communications liées à la sécurité peuvent être des messages d'état ou servir à déclencher une fonction de sécurité (par exemple, réduction des paramètres, arrêt). Les commandes d'arrêt sont décrites conformément à la norme CEI 60204-1, selon laquelle l'Arrêt d'urgence correspond à un arrêt de catégorie 1 et l'arrêt de sécurité à un arrêt de catégorie 2.
L'interface PROFIsafe offre une alternative sûre et basée sur le réseau à la connexion des fils aux broches E/S de sécurité du boîtier de commande du robot. L'utilisation de l'interface PROFIsafe permet de respecter les spécifications de sécurité fonctionnelle du robot UR (PL, catégorie et PFH). Pour plus de détails, consultez la section « Tableau des fonctions de sécurité » du manuel UR. Par exemple, l'« arrêt de sécurité » est de catégorie PLd 3 avec une valeur PFH inférieure à 1,8E-07 (1,8 x 10-7).
PROFIsafe n'est disponible que sur les robots disposant d'une licence d'activation, que vous pouvez obtenir en contactant votre représentant commercial local. Après avoir obtenu la licence, téléchargez-la à partir de myUR. Veuillez vous reporter à la section « Enregistrement du robot et fichiers de licence URCap » pour obtenir des informations concernant l'enregistrement du robot et l'activation de la licence.
|
| Entrée de PLC de sécurité |
Un message d'état que le robot envoie au PLC de sécurité contenant les informations affichées dans le tableau suivant.
|
||||||||||||||||
|
|
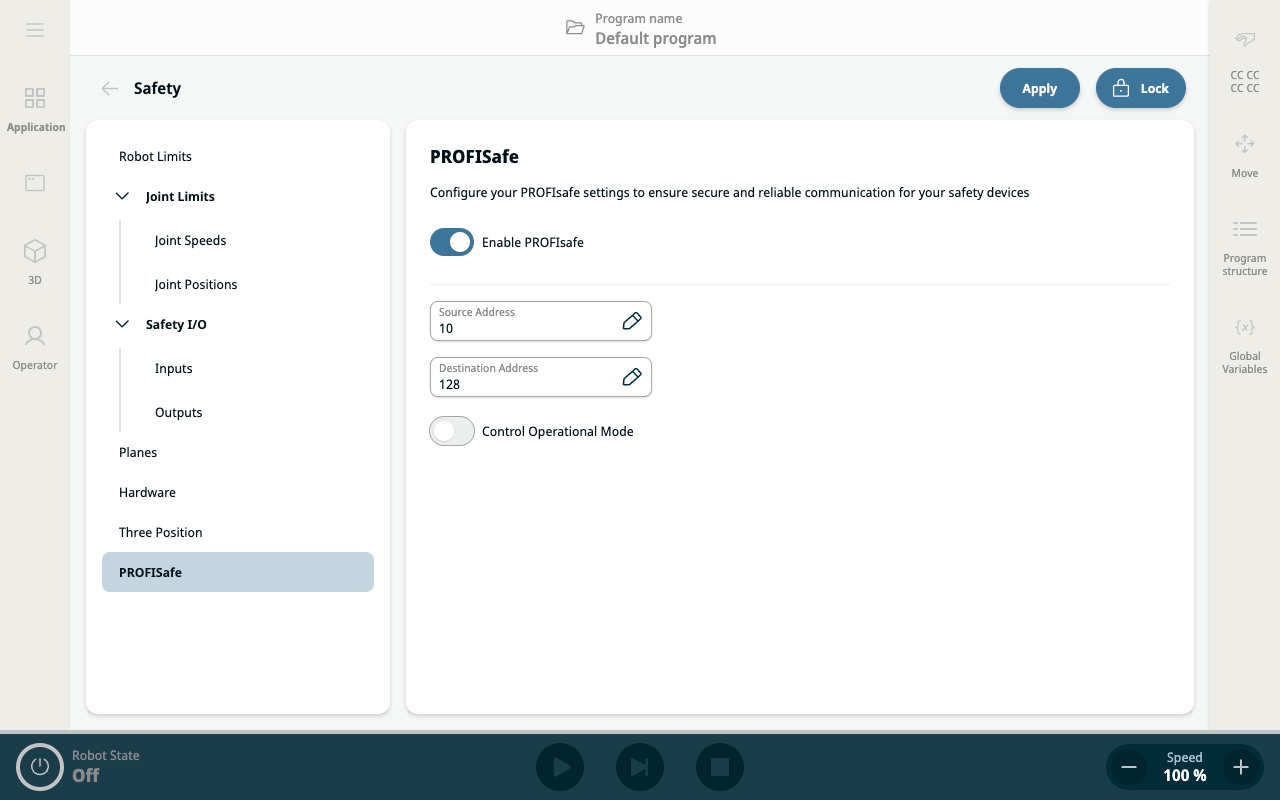
| Configuration de PROFIsafe |
|
|
|
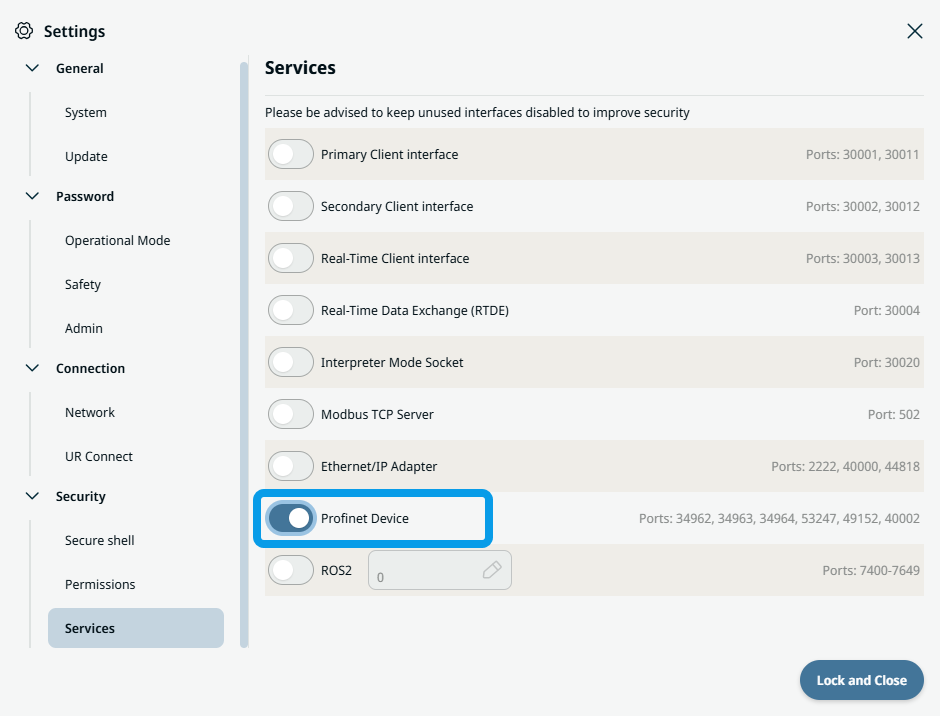
Pour configurer et utiliser PROFIsafe, l'appareil Profinet doit être activé dans le menu des réglages des services de sécurité.
 Consultez la section « Profinet » pour plus de détails et pour connaître l'emplacement de l'interface.
|