PROFIsafe
| Descripción |
El protocolo de red PROFIsafe (implementado en la versión 2.6.1) permite que el robot se comunique con un PLC de seguridad de acuerdo con los requisitos de la norma ISO 13849, Cat. 3, PLd. El robot transmite información relacionada con la seguridad a un PLC de seguridad y recibe información relacionada con la seguridad. Las comunicaciones relacionadas con la seguridad pueden ser mensajes de estado o servir para activar una función de seguridad (por ejemplo, ajustes reducidos, parada). Los comandos de parada se describen de acuerdo con la norma IEC 60204-1, en la que la parada de emergencia es una parada de categoría 1 y la parada de seguridad es una parada de categoría 2.
La interfaz PROFIsafe proporciona una alternativa segura basada en la red para conectar cables a los pines de E/S de seguridad de la caja de control del robot. El uso de la interfaz PROFIsafe mantiene las especificaciones de seguridad funcional del robot UR (PL, categoría y PFH). Para más detalles, consulte la sección «Tabla de funciones de seguridad» del manual de UR. Por ejemplo, la «parada de seguridad» es de categoría 3 según PLd, con un valor PFH inferior a 1,8E-07 (1,8 x 10-7).
PROFIsafe solo está disponible en robots que tengan una licencia de habilitación, que puede obtener poniéndose en contacto con su representante de ventas local. Cuando obtenga la licencia, descárguela desde myUR. Consulte «Registro del robot y archivos de licencia URCap» para obtener información sobre el registro del robot y la activación de la licencia.
|
| PLC de seguridad: Entrada |
Un mensaje de estado que el robot envía al PLC de seguridad contiene la información que se muestra en la siguiente tabla.
|
||||||||||||||||
|
|
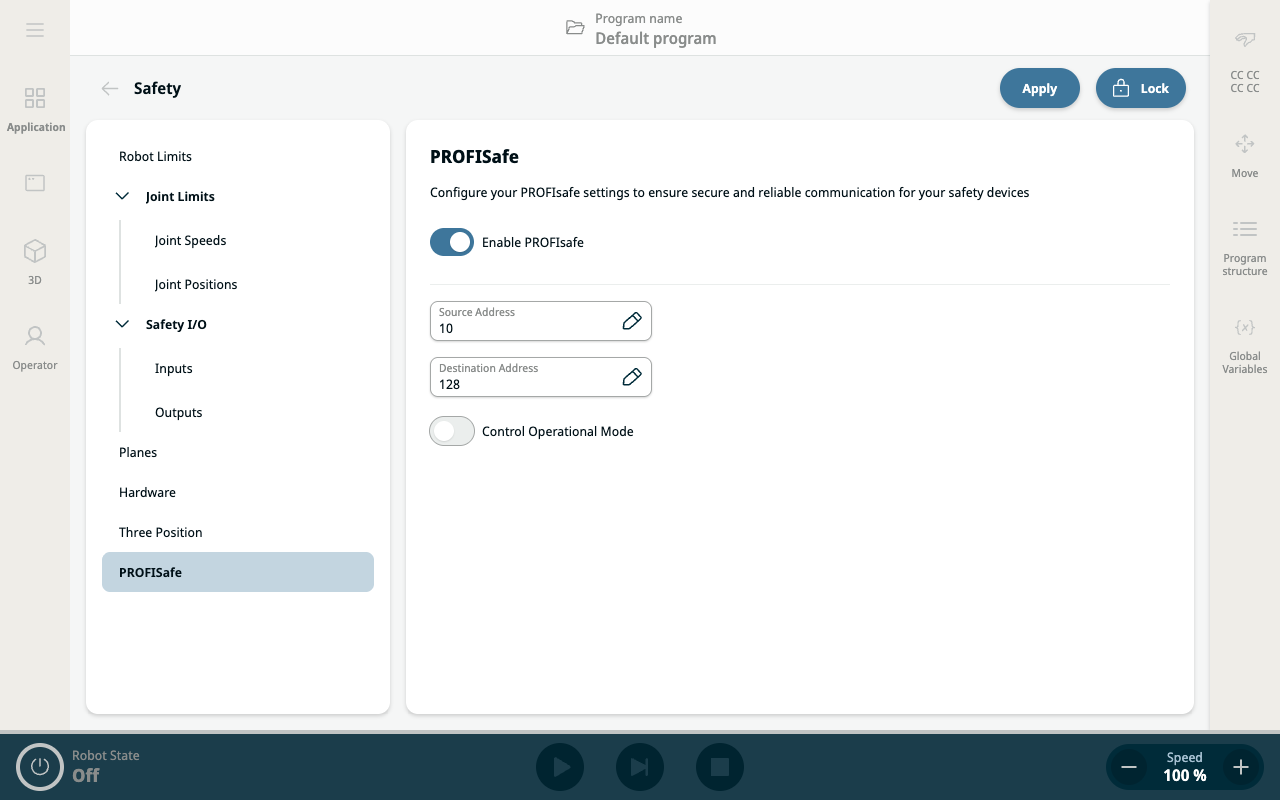
| Configuración de PROFIsafe |
|
|
|
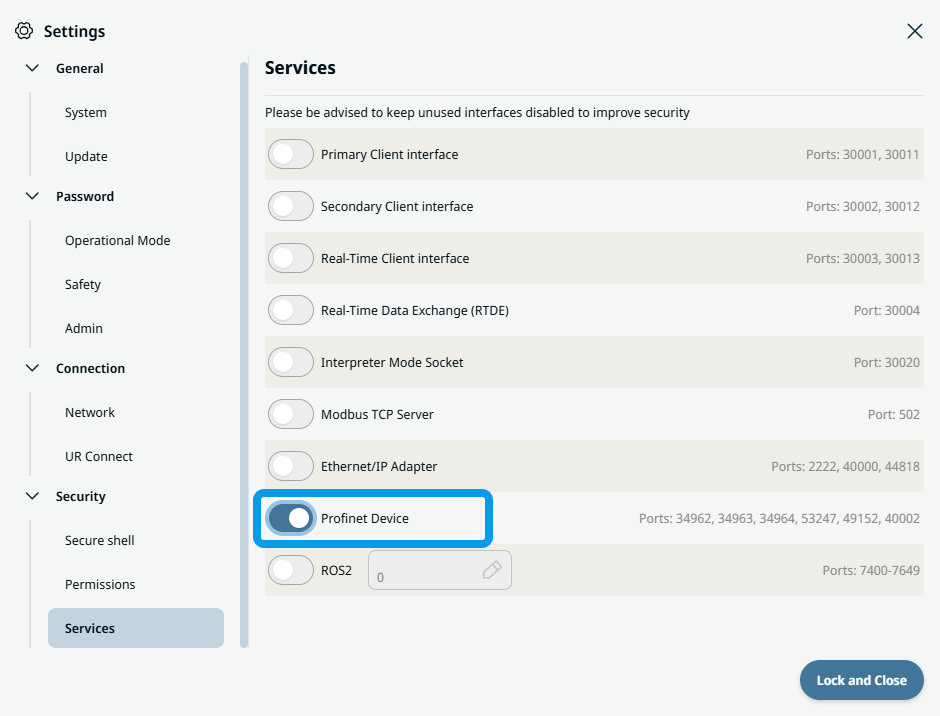
Para configurar y utilizar PROFIsafe, el dispositivo Profinet debe estar habilitado en el menú de ajustes de los servicios de seguridad.
 Consulte «Profinet» para obtener más detalles y conocer la ubicación de la interfaz.
|